Convert and Optimize YOLOv9 with OpenVINO™#
This Jupyter notebook can be launched after a local installation only.

YOLOv9 marks a significant advancement in real-time object detection, introducing groundbreaking techniques such as Programmable Gradient Information (PGI) and the Generalized Efficient Layer Aggregation Network (GELAN). This model demonstrates remarkable improvements in efficiency, accuracy, and adaptability, setting new benchmarks on the MS COCO dataset. More details about model can be found in paper and original repository This tutorial demonstrates step-by-step instructions on how to run and optimize PyTorch YOLO V9 with OpenVINO.
The tutorial consists of the following steps:
Prepare PyTorch model
Convert PyTorch model to OpenVINO IR
Run model inference with OpenVINO
Prepare and run optimization pipeline
Compare performance of the FP32 and quantized models.
Run optimized model inference on video
Table of contents:
Installation Instructions#
This is a self-contained example that relies solely on its own code.
We recommend running the notebook in a virtual environment. You only need a Jupyter server to start. For details, please refer to Installation Guide.
Prerequisites#
%pip install -q "openvino>=2023.3.0" "nncf>=2.8.1" "opencv-python" "matplotlib>=3.4" "seaborn" "pandas" "scikit-learn" "torch" "torchvision" "tqdm" --extra-index-url https://download.pytorch.org/whl/cpu
Note: you may need to restart the kernel to use updated packages.
from pathlib import Path
# Fetch `notebook_utils` module
import requests
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/notebook_utils.py",
)
open("notebook_utils.py", "w").write(r.text)
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/cmd_helper.py",
)
open("cmd_helper.py", "w").write(r.text)
from cmd_helper import clone_repo
from notebook_utils import download_file, VideoPlayer, device_widget
clone_repo("https://github.com/WongKinYiu/yolov9", add_to_sys_path=False)
%cd yolov9
/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/notebooks/yolov9-optimization/yolov9
Get PyTorch model#
Generally, PyTorch models represent an instance of the
torch.nn.Module
class, initialized by a state dictionary with model weights. We will use
the gelan-c (light-weight version of yolov9) model pre-trained on a
COCO dataset, which is available in this
repo, but the same steps are
applicable for other models from YOLO V9 family.
# Download pre-trained model weights
MODEL_LINK = "https://github.com/WongKinYiu/yolov9/releases/download/v0.1/gelan-c.pt"
DATA_DIR = Path("data/")
MODEL_DIR = Path("model/")
MODEL_DIR.mkdir(exist_ok=True)
DATA_DIR.mkdir(exist_ok=True)
download_file(MODEL_LINK, directory=MODEL_DIR, show_progress=True)
gelan-c.pt: 0%| | 0.00/49.1M [00:00<?, ?B/s]
PosixPath('/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/notebooks/yolov9-optimization/yolov9/model/gelan-c.pt')
Convert PyTorch model to OpenVINO IR#
OpenVINO supports PyTorch model conversion via Model Conversion API.
ov.convert_model function accepts model object and example input for
tracing the model and returns an instance of ov.Model, representing
this model in OpenVINO format. The Obtained model is ready for loading
on specific devices or can be saved on disk for the next deployment
using ov.save_model.
from models.experimental import attempt_load
import torch
import openvino as ov
from models.yolo import Detect, DualDDetect
from utils.general import yaml_save, yaml_load
weights = MODEL_DIR / "gelan-c.pt"
ov_model_path = MODEL_DIR / weights.name.replace(".pt", "_openvino_model") / weights.name.replace(".pt", ".xml")
if not ov_model_path.exists():
model = attempt_load(weights, device="cpu", inplace=True, fuse=True)
metadata = {"stride": int(max(model.stride)), "names": model.names}
model.eval()
for k, m in model.named_modules():
if isinstance(m, (Detect, DualDDetect)):
m.inplace = False
m.dynamic = True
m.export = True
example_input = torch.zeros((1, 3, 640, 640))
model(example_input)
ov_model = ov.convert_model(model, example_input=example_input)
# specify input and output names for compatibility with yolov9 repo interface
ov_model.outputs[0].get_tensor().set_names({"output0"})
ov_model.inputs[0].get_tensor().set_names({"images"})
ov.save_model(ov_model, ov_model_path)
# save metadata
yaml_save(ov_model_path.parent / weights.name.replace(".pt", ".yaml"), metadata)
else:
metadata = yaml_load(ov_model_path.parent / weights.name.replace(".pt", ".yaml"))
/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/notebooks/yolov9-optimization/yolov9/models/experimental.py:243: FutureWarning: You are using torch.load with weights_only=False (the current default value), which uses the default pickle module implicitly. It is possible to construct malicious pickle data which will execute arbitrary code during unpickling (See pytorch/pytorch for more details). In a future release, the default value for weights_only will be flipped to True. This limits the functions that could be executed during unpickling. Arbitrary objects will no longer be allowed to be loaded via this mode unless they are explicitly allowlisted by the user via torch.serialization.add_safe_globals. We recommend you start setting weights_only=True for any use case where you don't have full control of the loaded file. Please open an issue on GitHub for any issues related to this experimental feature. ckpt = torch.load(attempt_download(w), map_location='cpu') # load Fusing layers... Model summary: 387 layers, 25288768 parameters, 0 gradients, 102.1 GFLOPs /opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/notebooks/yolov9-optimization/yolov9/models/yolo.py:108: TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs! elif self.dynamic or self.shape != shape:
Verify model inference#
To test model work, we create inference pipeline similar to
detect.py. The pipeline consists of preprocessing step, inference of
OpenVINO model, and results post-processing to get bounding boxes.
Preprocessing#
Model input is a tensor with the [1, 3, 640, 640] shape in
N, C, H, W format, where
N- number of images in batch (batch size)C- image channelsH- image heightW- image width
Model expects images in RGB channels format and normalized in [0, 1]
range. To resize images to fit model size letterbox resize approach
is used where the aspect ratio of width and height is preserved. It is
defined in yolov9 repository.
To keep specific shape, preprocessing automatically enables padding.
import numpy as np
import torch
from PIL import Image
from utils.augmentations import letterbox
image_url = "https://github.com/openvinotoolkit/openvino_notebooks/assets/29454499/7b6af406-4ccb-4ded-a13d-62b7c0e42e96"
download_file(image_url, directory=DATA_DIR, filename="test_image.jpg", show_progress=True)
def preprocess_image(img0: np.ndarray):
"""
Preprocess image according to YOLOv9 input requirements.
Takes image in np.array format, resizes it to specific size using letterbox resize, converts color space from BGR (default in OpenCV) to RGB and changes data layout from HWC to CHW.
Parameters:
img0 (np.ndarray): image for preprocessing
Returns:
img (np.ndarray): image after preprocessing
img0 (np.ndarray): original image
"""
# resize
img = letterbox(img0, auto=False)[0]
# Convert
img = img.transpose(2, 0, 1)
img = np.ascontiguousarray(img)
return img, img0
def prepare_input_tensor(image: np.ndarray):
"""
Converts preprocessed image to tensor format according to YOLOv9 input requirements.
Takes image in np.array format with unit8 data in [0, 255] range and converts it to torch.Tensor object with float data in [0, 1] range
Parameters:
image (np.ndarray): image for conversion to tensor
Returns:
input_tensor (torch.Tensor): float tensor ready to use for YOLOv9 inference
"""
input_tensor = image.astype(np.float32) # uint8 to fp16/32
input_tensor /= 255.0 # 0 - 255 to 0.0 - 1.0
if input_tensor.ndim == 3:
input_tensor = np.expand_dims(input_tensor, 0)
return input_tensor
NAMES = metadata["names"]
test_image.jpg: 0%| | 0.00/101k [00:00<?, ?B/s]
Postprocessing#
Model output contains detection boxes candidates. It is a tensor with
the [1,25200,85] shape in the B, N, 85 format, where:
B- batch sizeN- number of detection boxes
Detection box has the [x, y, h, w, box_score,
class_no_1, …, class_no_80] format, where:
(
x,y) - raw coordinates of box centerh,w- raw height and width of boxbox_score- confidence of detection boxclass_no_1, …,class_no_80- probability distribution over the classes.
For getting final prediction, we need to apply non maximum suppression algorithm and rescale boxes coordinates to original image size.
from utils.plots import Annotator, colors
from typing import List, Tuple
from utils.general import scale_boxes, non_max_suppression
def detect(
model: ov.Model,
image_path: Path,
conf_thres: float = 0.25,
iou_thres: float = 0.45,
classes: List[int] = None,
agnostic_nms: bool = False,
):
"""
OpenVINO YOLOv9 model inference function. Reads image, preprocess it, runs model inference and postprocess results using NMS.
Parameters:
model (Model): OpenVINO compiled model.
image_path (Path): input image path.
conf_thres (float, *optional*, 0.25): minimal accepted confidence for object filtering
iou_thres (float, *optional*, 0.45): minimal overlap score for removing objects duplicates in NMS
classes (List[int], *optional*, None): labels for prediction filtering, if not provided all predicted labels will be used
agnostic_nms (bool, *optional*, False): apply class agnostic NMS approach or not
Returns:
pred (List): list of detections with (n,6) shape, where n - number of detected boxes in format [x1, y1, x2, y2, score, label]
orig_img (np.ndarray): image before preprocessing, can be used for results visualization
inpjut_shape (Tuple[int]): shape of model input tensor, can be used for output rescaling
"""
if isinstance(image_path, np.ndarray):
img = image_path
else:
img = np.array(Image.open(image_path))
preprocessed_img, orig_img = preprocess_image(img)
input_tensor = prepare_input_tensor(preprocessed_img)
predictions = torch.from_numpy(model(input_tensor)[0])
pred = non_max_suppression(predictions, conf_thres, iou_thres, classes=classes, agnostic=agnostic_nms)
return pred, orig_img, input_tensor.shape
def draw_boxes(
predictions: np.ndarray,
input_shape: Tuple[int],
image: np.ndarray,
names: List[str],
):
"""
Utility function for drawing predicted bounding boxes on image
Parameters:
predictions (np.ndarray): list of detections with (n,6) shape, where n - number of detected boxes in format [x1, y1, x2, y2, score, label]
image (np.ndarray): image for boxes visualization
names (List[str]): list of names for each class in dataset
colors (Dict[str, int]): mapping between class name and drawing color
Returns:
image (np.ndarray): box visualization result
"""
if not len(predictions):
return image
annotator = Annotator(image, line_width=1, example=str(names))
# Rescale boxes from input size to original image size
predictions[:, :4] = scale_boxes(input_shape[2:], predictions[:, :4], image.shape).round()
# Write results
for *xyxy, conf, cls in reversed(predictions):
label = f"{names[int(cls)]} {conf:.2f}"
annotator.box_label(xyxy, label, color=colors(int(cls), True))
return image
core = ov.Core()
# read converted model
ov_model = core.read_model(ov_model_path)
Select inference device#
select device from dropdown list for running inference using OpenVINO
device = device_widget()
device
Dropdown(description='Device:', index=1, options=('CPU', 'AUTO'), value='AUTO')
# load model on selected device
if device.value != "CPU":
ov_model.reshape({0: [1, 3, 640, 640]})
compiled_model = core.compile_model(ov_model, device.value)
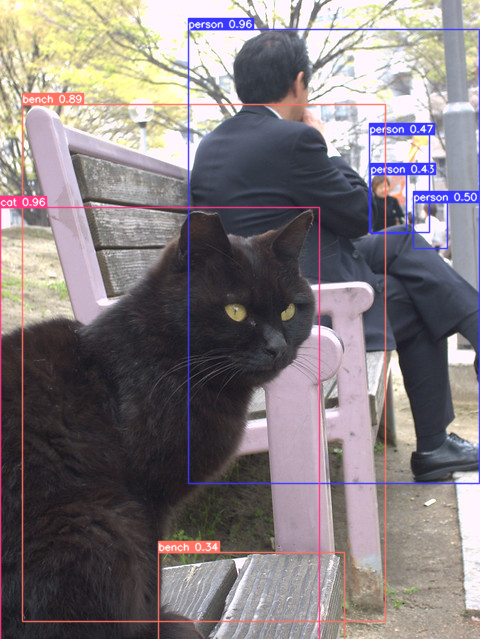
boxes, image, input_shape = detect(compiled_model, DATA_DIR / "test_image.jpg")
image_with_boxes = draw_boxes(boxes[0], input_shape, image, NAMES)
# visualize results
Image.fromarray(image_with_boxes)
Optimize model using NNCF Post-training Quantization API#
NNCF provides a suite of advanced algorithms for Neural Networks inference optimization in OpenVINO with minimal accuracy drop. We will use 8-bit quantization in post-training mode (without the fine-tuning pipeline) to optimize YOLOv9. The optimization process contains the following steps:
Create a Dataset for quantization.
Run
nncf.quantizefor getting an optimized model.Serialize an OpenVINO IR model, using the
ov.save_modelfunction.
Prepare dataset#
The code below downloads COCO dataset and prepares a dataloader that is used to evaluate the yolov9 model accuracy. We reuse its subset for quantization.
from zipfile import ZipFile
DATA_URL = "http://images.cocodataset.org/zips/val2017.zip"
LABELS_URL = "https://github.com/ultralytics/yolov5/releases/download/v1.0/coco2017labels-segments.zip"
OUT_DIR = Path(".")
download_file(DATA_URL, directory=OUT_DIR, show_progress=True)
download_file(LABELS_URL, directory=OUT_DIR, show_progress=True)
if not (OUT_DIR / "coco/labels").exists():
with ZipFile("coco2017labels-segments.zip", "r") as zip_ref:
zip_ref.extractall(OUT_DIR)
with ZipFile("val2017.zip", "r") as zip_ref:
zip_ref.extractall(OUT_DIR / "coco/images")
val2017.zip: 0%| | 0.00/778M [00:00<?, ?B/s]
coco2017labels-segments.zip: 0%| | 0.00/169M [00:00<?, ?B/s]
from collections import namedtuple
import yaml
from utils.dataloaders import create_dataloader
from utils.general import colorstr
# read dataset config
DATA_CONFIG = "data/coco.yaml"
with open(DATA_CONFIG) as f:
data = yaml.load(f, Loader=yaml.SafeLoader)
# Dataloader
TASK = "val" # path to train/val/test images
Option = namedtuple("Options", ["single_cls"]) # imitation of commandline provided options for single class evaluation
opt = Option(False)
dataloader = create_dataloader(
str(Path("coco") / data[TASK]),
640,
1,
32,
opt,
pad=0.5,
prefix=colorstr(f"{TASK}: "),
)[0]
val: Scanning coco/val2017... 4952 images, 48 backgrounds, 0 corrupt: 100%|██████████| 5000/5000 00:00
val: New cache created: coco/val2017.cache
NNCF provides nncf.Dataset wrapper for using native framework
dataloaders in quantization pipeline. Additionally, we specify transform
function that will be responsible for preparing input data in model
expected format.
import nncf
def transform_fn(data_item):
"""
Quantization transform function. Extracts and preprocess input data from dataloader item for quantization.
Parameters:
data_item: Tuple with data item produced by DataLoader during iteration
Returns:
input_tensor: Input data for quantization
"""
img = data_item[0].numpy()
input_tensor = prepare_input_tensor(img)
return input_tensor
quantization_dataset = nncf.Dataset(dataloader, transform_fn)
INFO:nncf:NNCF initialized successfully. Supported frameworks detected: torch, tensorflow, onnx, openvino
Perform model quantization#
The nncf.quantize function provides an interface for model
quantization. It requires an instance of the OpenVINO Model and
quantization dataset. Optionally, some additional parameters for the
configuration quantization process (number of samples for quantization,
preset, ignored scope etc.) can be provided. YOLOv9 model contains
non-ReLU activation functions, which require asymmetric quantization of
activations. To achieve better results, we will use a mixed
quantization preset. It provides symmetric quantization of weights and
asymmetric quantization of activations.
ov_int8_model_path = MODEL_DIR / weights.name.replace(".pt", "_int8_openvino_model") / weights.name.replace(".pt", "_int8.xml")
if not ov_int8_model_path.exists():
quantized_model = nncf.quantize(ov_model, quantization_dataset, preset=nncf.QuantizationPreset.MIXED)
ov.save_model(quantized_model, ov_int8_model_path)
yaml_save(ov_int8_model_path.parent / weights.name.replace(".pt", "_int8.yaml"), metadata)
2024-12-10 06:13:54.195413: I tensorflow/core/util/port.cc:110] oneDNN custom operations are on. You may see slightly different numerical results due to floating-point round-off errors from different computation orders. To turn them off, set the environment variable TF_ENABLE_ONEDNN_OPTS=0. 2024-12-10 06:13:54.221233: I tensorflow/core/platform/cpu_feature_guard.cc:182] This TensorFlow binary is optimized to use available CPU instructions in performance-critical operations. To enable the following instructions: AVX2 AVX512F AVX512_VNNI FMA, in other operations, rebuild TensorFlow with the appropriate compiler flags.
Output()
Output()
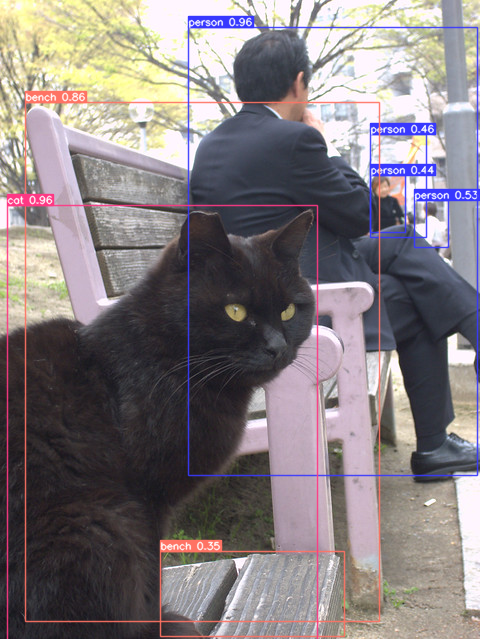
Run quantized model inference#
There are no changes in model usage after applying quantization. Let’s check the model work on the previously used image.
quantized_model = core.read_model(ov_int8_model_path)
if device.value != "CPU":
quantized_model.reshape({0: [1, 3, 640, 640]})
compiled_model = core.compile_model(quantized_model, device.value)
boxes, image, input_shape = detect(compiled_model, DATA_DIR / "test_image.jpg")
image_with_boxes = draw_boxes(boxes[0], input_shape, image, NAMES)
# visualize results
Image.fromarray(image_with_boxes)
Compare Performance of the Original and Quantized Models#
We use the OpenVINO Benchmark
Tool
to measure the inference performance of the FP32 and INT8
models.
NOTE: For more accurate performance, it is recommended to run
benchmark_appin a terminal/command prompt after closing other applications. Runbenchmark_app -m model.xml -d CPUto benchmark async inference on CPU for one minute. ChangeCPUtoGPUto benchmark on GPU. Runbenchmark_app --helpto see an overview of all command-line options.
!benchmark_app -m $ov_model_path -shape "[1,3,640,640]" -d $device.value -api async -t 15
[Step 1/11] Parsing and validating input arguments
[ INFO ] Parsing input parameters
[Step 2/11] Loading OpenVINO Runtime
[ INFO ] OpenVINO:
[ INFO ] Build ................................. 2024.5.0-16993-9c432a3641a
[ INFO ]
[ INFO ] Device info:
[ INFO ] AUTO
[ INFO ] Build ................................. 2024.5.0-16993-9c432a3641a
[ INFO ]
[ INFO ]
[Step 3/11] Setting device configuration
[ WARNING ] Performance hint was not explicitly specified in command line. Device(AUTO) performance hint will be set to PerformanceMode.THROUGHPUT.
[Step 4/11] Reading model files
[ INFO ] Loading model files
[ INFO ] Read model took 26.35 ms
[ INFO ] Original model I/O parameters:
[ INFO ] Model inputs:
[ INFO ] images (node: x) : f32 / [...] / [?,3,?,?]
[ INFO ] Model outputs:
[ INFO ] output0 (node: __module.model.22/aten::cat/Concat_5) : f32 / [...] / [?,84,8400]
[ INFO ] xi.1 (node: __module.model.22/aten::cat/Concat_2) : f32 / [...] / [?,144,4..,4..]
[ INFO ] xi.3 (node: __module.model.22/aten::cat/Concat_1) : f32 / [...] / [?,144,2..,2..]
[ INFO ] xi (node: __module.model.22/aten::cat/Concat) : f32 / [...] / [?,144,1..,1..]
[Step 5/11] Resizing model to match image sizes and given batch
[ INFO ] Model batch size: 1
[ INFO ] Reshaping model: 'images': [1,3,640,640]
[ INFO ] Reshape model took 7.83 ms
[Step 6/11] Configuring input of the model
[ INFO ] Model inputs:
[ INFO ] images (node: x) : u8 / [N,C,H,W] / [1,3,640,640]
[ INFO ] Model outputs:
[ INFO ] output0 (node: __module.model.22/aten::cat/Concat_5) : f32 / [...] / [1,84,8400]
[ INFO ] xi.1 (node: __module.model.22/aten::cat/Concat_2) : f32 / [...] / [1,144,80,80]
[ INFO ] xi.3 (node: __module.model.22/aten::cat/Concat_1) : f32 / [...] / [1,144,40,40]
[ INFO ] xi (node: __module.model.22/aten::cat/Concat) : f32 / [...] / [1,144,20,20]
[Step 7/11] Loading the model to the device
[ INFO ] Compile model took 487.18 ms
[Step 8/11] Querying optimal runtime parameters
[ INFO ] Model:
[ INFO ] NETWORK_NAME: Model0
[ INFO ] EXECUTION_DEVICES: ['CPU']
[ INFO ] PERFORMANCE_HINT: PerformanceMode.THROUGHPUT
[ INFO ] OPTIMAL_NUMBER_OF_INFER_REQUESTS: 6
[ INFO ] MULTI_DEVICE_PRIORITIES: CPU
[ INFO ] CPU:
[ INFO ] AFFINITY: Affinity.CORE
[ INFO ] CPU_DENORMALS_OPTIMIZATION: False
[ INFO ] CPU_SPARSE_WEIGHTS_DECOMPRESSION_RATE: 1.0
[ INFO ] DYNAMIC_QUANTIZATION_GROUP_SIZE: 32
[ INFO ] ENABLE_CPU_PINNING: True
[ INFO ] ENABLE_HYPER_THREADING: True
[ INFO ] EXECUTION_DEVICES: ['CPU']
[ INFO ] EXECUTION_MODE_HINT: ExecutionMode.PERFORMANCE
[ INFO ] INFERENCE_NUM_THREADS: 24
[ INFO ] INFERENCE_PRECISION_HINT: <Type: 'float32'>
[ INFO ] KV_CACHE_PRECISION: <Type: 'float16'>
[ INFO ] LOG_LEVEL: Level.NO
[ INFO ] MODEL_DISTRIBUTION_POLICY: set()
[ INFO ] NETWORK_NAME: Model0
[ INFO ] NUM_STREAMS: 6
[ INFO ] OPTIMAL_NUMBER_OF_INFER_REQUESTS: 6
[ INFO ] PERFORMANCE_HINT: THROUGHPUT
[ INFO ] PERFORMANCE_HINT_NUM_REQUESTS: 0
[ INFO ] PERF_COUNT: NO
[ INFO ] SCHEDULING_CORE_TYPE: SchedulingCoreType.ANY_CORE
[ INFO ] MODEL_PRIORITY: Priority.MEDIUM
[ INFO ] LOADED_FROM_CACHE: False
[ INFO ] PERF_COUNT: False
[Step 9/11] Creating infer requests and preparing input tensors
[ WARNING ] No input files were given for input 'images'!. This input will be filled with random values!
[ INFO ] Fill input 'images' with random values
[Step 10/11] Measuring performance (Start inference asynchronously, 6 inference requests, limits: 15000 ms duration)
[ INFO ] Benchmarking in inference only mode (inputs filling are not included in measurement loop).
[ INFO ] First inference took 183.06 ms
[Step 11/11] Dumping statistics report
[ INFO ] Execution Devices:['CPU']
[ INFO ] Count: 222 iterations
[ INFO ] Duration: 15281.42 ms
[ INFO ] Latency:
[ INFO ] Median: 411.71 ms
[ INFO ] Average: 409.68 ms
[ INFO ] Min: 266.74 ms
[ INFO ] Max: 431.51 ms
[ INFO ] Throughput: 14.53 FPS
!benchmark_app -m $ov_int8_model_path -shape "[1,3,640,640]" -d $device.value -api async -t 15
[Step 1/11] Parsing and validating input arguments
[ INFO ] Parsing input parameters
[Step 2/11] Loading OpenVINO Runtime
[ INFO ] OpenVINO:
[ INFO ] Build ................................. 2024.5.0-16993-9c432a3641a
[ INFO ]
[ INFO ] Device info:
[ INFO ] AUTO
[ INFO ] Build ................................. 2024.5.0-16993-9c432a3641a
[ INFO ]
[ INFO ]
[Step 3/11] Setting device configuration
[ WARNING ] Performance hint was not explicitly specified in command line. Device(AUTO) performance hint will be set to PerformanceMode.THROUGHPUT.
[Step 4/11] Reading model files
[ INFO ] Loading model files
[ INFO ] Read model took 40.12 ms
[ INFO ] Original model I/O parameters:
[ INFO ] Model inputs:
[ INFO ] images (node: x) : f32 / [...] / [1,3,640,640]
[ INFO ] Model outputs:
[ INFO ] output0 (node: __module.model.22/aten::cat/Concat_5) : f32 / [...] / [1,84,8400]
[ INFO ] xi.1 (node: __module.model.22/aten::cat/Concat_2) : f32 / [...] / [1,144,80,80]
[ INFO ] xi.3 (node: __module.model.22/aten::cat/Concat_1) : f32 / [...] / [1,144,40,40]
[ INFO ] xi (node: __module.model.22/aten::cat/Concat) : f32 / [...] / [1,144,20,20]
[Step 5/11] Resizing model to match image sizes and given batch
[ INFO ] Model batch size: 1
[ INFO ] Reshaping model: 'images': [1,3,640,640]
[ INFO ] Reshape model took 0.04 ms
[Step 6/11] Configuring input of the model
[ INFO ] Model inputs:
[ INFO ] images (node: x) : u8 / [N,C,H,W] / [1,3,640,640]
[ INFO ] Model outputs:
[ INFO ] output0 (node: __module.model.22/aten::cat/Concat_5) : f32 / [...] / [1,84,8400]
[ INFO ] xi.1 (node: __module.model.22/aten::cat/Concat_2) : f32 / [...] / [1,144,80,80]
[ INFO ] xi.3 (node: __module.model.22/aten::cat/Concat_1) : f32 / [...] / [1,144,40,40]
[ INFO ] xi (node: __module.model.22/aten::cat/Concat) : f32 / [...] / [1,144,20,20]
[Step 7/11] Loading the model to the device
[ INFO ] Compile model took 909.49 ms
[Step 8/11] Querying optimal runtime parameters
[ INFO ] Model:
[ INFO ] NETWORK_NAME: Model0
[ INFO ] EXECUTION_DEVICES: ['CPU']
[ INFO ] PERFORMANCE_HINT: PerformanceMode.THROUGHPUT
[ INFO ] OPTIMAL_NUMBER_OF_INFER_REQUESTS: 6
[ INFO ] MULTI_DEVICE_PRIORITIES: CPU
[ INFO ] CPU:
[ INFO ] AFFINITY: Affinity.CORE
[ INFO ] CPU_DENORMALS_OPTIMIZATION: False
[ INFO ] CPU_SPARSE_WEIGHTS_DECOMPRESSION_RATE: 1.0
[ INFO ] DYNAMIC_QUANTIZATION_GROUP_SIZE: 32
[ INFO ] ENABLE_CPU_PINNING: True
[ INFO ] ENABLE_HYPER_THREADING: True
[ INFO ] EXECUTION_DEVICES: ['CPU']
[ INFO ] EXECUTION_MODE_HINT: ExecutionMode.PERFORMANCE
[ INFO ] INFERENCE_NUM_THREADS: 24
[ INFO ] INFERENCE_PRECISION_HINT: <Type: 'float32'>
[ INFO ] KV_CACHE_PRECISION: <Type: 'float16'>
[ INFO ] LOG_LEVEL: Level.NO
[ INFO ] MODEL_DISTRIBUTION_POLICY: set()
[ INFO ] NETWORK_NAME: Model0
[ INFO ] NUM_STREAMS: 6
[ INFO ] OPTIMAL_NUMBER_OF_INFER_REQUESTS: 6
[ INFO ] PERFORMANCE_HINT: THROUGHPUT
[ INFO ] PERFORMANCE_HINT_NUM_REQUESTS: 0
[ INFO ] PERF_COUNT: NO
[ INFO ] SCHEDULING_CORE_TYPE: SchedulingCoreType.ANY_CORE
[ INFO ] MODEL_PRIORITY: Priority.MEDIUM
[ INFO ] LOADED_FROM_CACHE: False
[ INFO ] PERF_COUNT: False
[Step 9/11] Creating infer requests and preparing input tensors
[ WARNING ] No input files were given for input 'images'!. This input will be filled with random values!
[ INFO ] Fill input 'images' with random values
[Step 10/11] Measuring performance (Start inference asynchronously, 6 inference requests, limits: 15000 ms duration)
[ INFO ] Benchmarking in inference only mode (inputs filling are not included in measurement loop).
[ INFO ] First inference took 71.82 ms
[Step 11/11] Dumping statistics report
[ INFO ] Execution Devices:['CPU']
[ INFO ] Count: 750 iterations
[ INFO ] Duration: 15085.49 ms
[ INFO ] Latency:
[ INFO ] Median: 120.60 ms
[ INFO ] Average: 120.21 ms
[ INFO ] Min: 74.22 ms
[ INFO ] Max: 135.62 ms
[ INFO ] Throughput: 49.72 FPS
Run Live Object Detection#
import collections
import time
from IPython import display
import cv2
# Main processing function to run object detection.
def run_object_detection(
source=0,
flip=False,
use_popup=False,
skip_first_frames=0,
model=ov_model,
device=device.value,
):
player = None
compiled_model = core.compile_model(model, device)
try:
# Create a video player to play with target fps.
player = VideoPlayer(source=source, flip=flip, fps=30, skip_first_frames=skip_first_frames)
# Start capturing.
player.start()
if use_popup:
title = "Press ESC to Exit"
cv2.namedWindow(winname=title, flags=cv2.WINDOW_GUI_NORMAL | cv2.WINDOW_AUTOSIZE)
processing_times = collections.deque()
while True:
# Grab the frame.
frame = player.next()
if frame is None:
print("Source ended")
break
# If the frame is larger than full HD, reduce size to improve the performance.
scale = 1280 / max(frame.shape)
if scale < 1:
frame = cv2.resize(
src=frame,
dsize=None,
fx=scale,
fy=scale,
interpolation=cv2.INTER_AREA,
)
# Get the results.
input_image = np.array(frame)
start_time = time.time()
# model expects RGB image, while video capturing in BGR
detections, _, input_shape = detect(compiled_model, input_image[:, :, ::-1])
stop_time = time.time()
image_with_boxes = draw_boxes(detections[0], input_shape, input_image, NAMES)
frame = image_with_boxes
processing_times.append(stop_time - start_time)
# Use processing times from last 200 frames.
if len(processing_times) > 200:
processing_times.popleft()
_, f_width = frame.shape[:2]
# Mean processing time [ms].
processing_time = np.mean(processing_times) * 1000
fps = 1000 / processing_time
cv2.putText(
img=frame,
text=f"Inference time: {processing_time:.1f}ms ({fps:.1f} FPS)",
org=(20, 40),
fontFace=cv2.FONT_HERSHEY_COMPLEX,
fontScale=f_width / 1000,
color=(0, 0, 255),
thickness=1,
lineType=cv2.LINE_AA,
)
# Use this workaround if there is flickering.
if use_popup:
cv2.imshow(winname=title, mat=frame)
key = cv2.waitKey(1)
# escape = 27
if key == 27:
break
else:
# Encode numpy array to jpg.
_, encoded_img = cv2.imencode(ext=".jpg", img=frame, params=[cv2.IMWRITE_JPEG_QUALITY, 100])
# Create an IPython image.⬆️
i = display.Image(data=encoded_img)
# Display the image in this notebook.
display.clear_output(wait=True)
display.display(i)
# ctrl-c
except KeyboardInterrupt:
print("Interrupted")
# any different error
except RuntimeError as e:
print(e)
finally:
if player is not None:
# Stop capturing.
player.stop()
if use_popup:
cv2.destroyAllWindows()
Use a webcam as the video input. By default, the primary webcam is set
with source=0. If you have multiple webcams, each one will be
assigned a consecutive number starting at 0. Set flip=True when
using a front-facing camera. Some web browsers, especially Mozilla
Firefox, may cause flickering. If you experience flickering,
set use_popup=True.
NOTE: To use this notebook with a webcam, you need to run the notebook on a computer with a webcam. If you run the notebook on a remote server (for example, in Binder or Google Colab service), the webcam will not work. By default, the lower cell will run model inference on a video file. If you want to try live inference on your webcam set
WEBCAM_INFERENCE = True
Run the object detection:
WEBCAM_INFERENCE = False
if WEBCAM_INFERENCE:
VIDEO_SOURCE = 0 # Webcam
else:
VIDEO_SOURCE = "https://storage.openvinotoolkit.org/repositories/openvino_notebooks/data/data/video/people.mp4"
device
Dropdown(description='Device:', index=1, options=('CPU', 'AUTO'), value='AUTO')
quantized_model = core.read_model(ov_int8_model_path)
run_object_detection(
source=VIDEO_SOURCE,
flip=True,
use_popup=False,
model=quantized_model,
device=device.value,
)

Source ended