Industrial Meter Reader#
This Jupyter notebook can be launched on-line, opening an interactive environment in a browser window. You can also make a local installation. Choose one of the following options:


This notebook shows how to create a industrial meter reader with OpenVINO Runtime. We use the pre-trained PPYOLOv2 PaddlePaddle model and DeepLabV3P to build up a multiple inference task pipeline:
Run detection model to find the meters, and crop them from the origin photo.
Run segmentation model on these cropped meters to get the pointer and scale instance.
Find the location of the pointer in scale map.
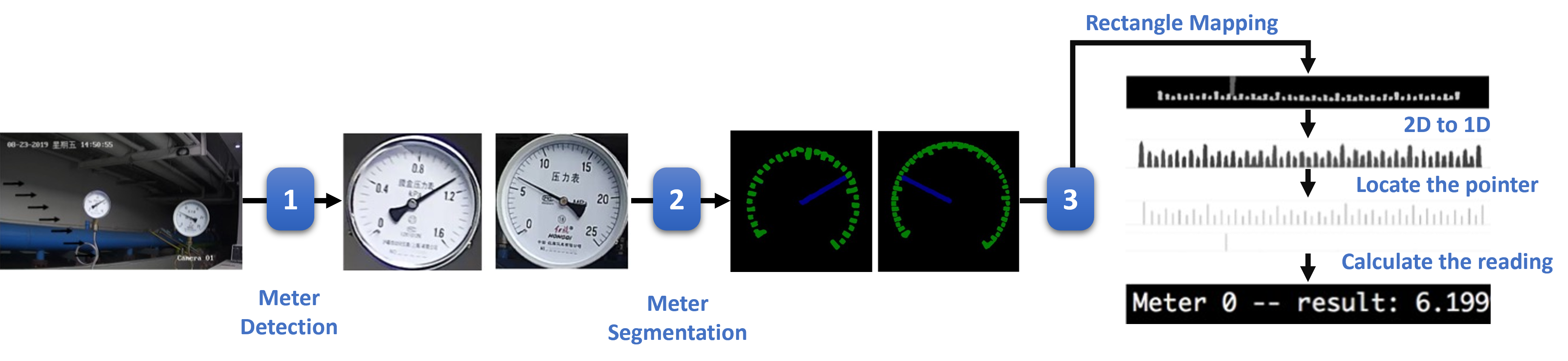
workflow#
Table of contents:
Installation Instructions#
This is a self-contained example that relies solely on its own code.
We recommend running the notebook in a virtual environment. You only need a Jupyter server to start. For details, please refer to Installation Guide.
# Install openvino package
%pip install -q "openvino>=2023.1.0" opencv-python tqdm "matplotlib>=3.4"
Note: you may need to restart the kernel to use updated packages.
Import#
import os
from pathlib import Path
import numpy as np
import math
import cv2
import tarfile
import matplotlib.pyplot as plt
import openvino as ov
# Fetch `notebook_utils` module
import requests
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/notebook_utils.py",
)
open("notebook_utils.py", "w").write(r.text)
from notebook_utils import download_file, segmentation_map_to_image, device_widget
Prepare the Model and Test Image#
Download PPYOLOv2 and DeepLabV3P pre-trained models from PaddlePaddle community.
MODEL_DIR = "model"
DATA_DIR = "data"
DET_MODEL_LINK = "https://storage.openvinotoolkit.org/repositories/openvino_notebooks/models/meter-reader/meter_det_model.tar.gz"
SEG_MODEL_LINK = "https://storage.openvinotoolkit.org/repositories/openvino_notebooks/models/meter-reader/meter_seg_model.tar.gz"
DET_FILE_NAME = DET_MODEL_LINK.split("/")[-1]
SEG_FILE_NAME = SEG_MODEL_LINK.split("/")[-1]
IMG_LINK = "https://user-images.githubusercontent.com/91237924/170696219-f68699c6-1e82-46bf-aaed-8e2fc3fa5f7b.jpg"
IMG_FILE_NAME = IMG_LINK.split("/")[-1]
IMG_PATH = Path(f"{DATA_DIR}/{IMG_FILE_NAME}")
os.makedirs(MODEL_DIR, exist_ok=True)
download_file(DET_MODEL_LINK, directory=MODEL_DIR, show_progress=True)
file = tarfile.open(f"model/{DET_FILE_NAME}")
res = file.extractall("model")
if not res:
print(f'Detection Model Extracted to "./{MODEL_DIR}".')
else:
print("Error Extracting the Detection model. Please check the network.")
download_file(SEG_MODEL_LINK, directory=MODEL_DIR, show_progress=True)
file = tarfile.open(f"model/{SEG_FILE_NAME}")
res = file.extractall("model")
if not res:
print(f'Segmentation Model Extracted to "./{MODEL_DIR}".')
else:
print("Error Extracting the Segmentation model. Please check the network.")
download_file(IMG_LINK, directory=DATA_DIR, show_progress=True)
if IMG_PATH.is_file():
print(f'Test Image Saved to "./{DATA_DIR}".')
else:
print("Error Downloading the Test Image. Please check the network.")
meter_det_model.tar.gz: 0%| | 0.00/192M [00:00<?, ?B/s]
Detection Model Extracted to "./model".
meter_seg_model.tar.gz: 0%| | 0.00/94.9M [00:00<?, ?B/s]
Segmentation Model Extracted to "./model".
170696219-f68699c6-1e82-46bf-aaed-8e2fc3fa5f7b.jpg: 0%| | 0.00/183k [00:00<?, ?B/s]
Test Image Saved to "./data".
Configuration#
Add parameter configuration for reading calculation.
METER_SHAPE = [512, 512]
CIRCLE_CENTER = [256, 256]
CIRCLE_RADIUS = 250
PI = math.pi
RECTANGLE_HEIGHT = 120
RECTANGLE_WIDTH = 1570
TYPE_THRESHOLD = 40
COLORMAP = np.array([[28, 28, 28], [238, 44, 44], [250, 250, 250]])
# There are 2 types of meters in test image datasets
METER_CONFIG = [
{"scale_interval_value": 25.0 / 50.0, "range": 25.0, "unit": "(MPa)"},
{"scale_interval_value": 1.6 / 32.0, "range": 1.6, "unit": "(MPa)"},
]
SEG_LABEL = {"background": 0, "pointer": 1, "scale": 2}
Load the Models#
Define a common class for model loading and inference
# Initialize OpenVINO Runtime
core = ov.Core()
class Model:
"""
This class represents a OpenVINO model object.
"""
def __init__(self, model_path, new_shape, device="CPU"):
"""
Initialize the model object
Param:
model_path (string): path of inference model
new_shape (dict): new shape of model input
"""
self.model = core.read_model(model=model_path)
self.model.reshape(new_shape)
self.compiled_model = core.compile_model(model=self.model, device_name=device)
self.output_layer = self.compiled_model.output(0)
def predict(self, input_image):
"""
Run inference
Param:
input_image (np.array): input data
Retuns:
result (np.array)): model output data
"""
result = self.compiled_model(input_image)[self.output_layer]
return result
Data Process#
Including the preprocessing and postprocessing tasks of each model.
def det_preprocess(input_image, target_size):
"""
Preprocessing the input data for detection task
Param:
input_image (np.array): input data
size (int): the image size required by model input layer
Retuns:
img.astype (np.array): preprocessed image
"""
img = cv2.resize(input_image, (target_size, target_size))
img = np.transpose(img, [2, 0, 1]) / 255
img = np.expand_dims(img, 0)
img_mean = np.array([0.485, 0.456, 0.406]).reshape((3, 1, 1))
img_std = np.array([0.229, 0.224, 0.225]).reshape((3, 1, 1))
img -= img_mean
img /= img_std
return img.astype(np.float32)
def filter_bboxes(det_results, score_threshold):
"""
Filter out the detection results with low confidence
Param:
det_results (list[dict]): detection results
score_threshold (float): confidence threshold
Retuns:
filtered_results (list[dict]): filter detection results
"""
filtered_results = []
for i in range(len(det_results)):
if det_results[i, 1] > score_threshold:
filtered_results.append(det_results[i])
return filtered_results
def roi_crop(image, results, scale_x, scale_y):
"""
Crop the area of detected meter of original image
Param:
img (np.array):original image。
det_results (list[dict]): detection results
scale_x (float): the scale value in x axis
scale_y (float): the scale value in y axis
Retuns:
roi_imgs (list[np.array]): the list of meter images
loc (list[int]): the list of meter locations
"""
roi_imgs = []
loc = []
for result in results:
bbox = result[2:]
xmin, ymin, xmax, ymax = [
int(bbox[0] * scale_x),
int(bbox[1] * scale_y),
int(bbox[2] * scale_x),
int(bbox[3] * scale_y),
]
sub_img = image[ymin : (ymax + 1), xmin : (xmax + 1), :]
roi_imgs.append(sub_img)
loc.append([xmin, ymin, xmax, ymax])
return roi_imgs, loc
def roi_process(input_images, target_size, interp=cv2.INTER_LINEAR):
"""
Prepare the roi image of detection results data
Preprocessing the input data for segmentation task
Param:
input_images (list[np.array]):the list of meter images
target_size (list|tuple): height and width of resized image, e.g [heigh,width]
interp (int):the interp method for image reszing
Retuns:
img_list (list[np.array]):the list of processed images
resize_img (list[np.array]): for visualization
"""
img_list = list()
resize_list = list()
for img in input_images:
img_shape = img.shape
scale_x = float(target_size[1]) / float(img_shape[1])
scale_y = float(target_size[0]) / float(img_shape[0])
resize_img = cv2.resize(img, None, None, fx=scale_x, fy=scale_y, interpolation=interp)
resize_list.append(resize_img)
resize_img = resize_img.transpose(2, 0, 1) / 255
img_mean = np.array([0.5, 0.5, 0.5]).reshape((3, 1, 1))
img_std = np.array([0.5, 0.5, 0.5]).reshape((3, 1, 1))
resize_img -= img_mean
resize_img /= img_std
img_list.append(resize_img)
return img_list, resize_list
def erode(seg_results, erode_kernel):
"""
Erode the segmentation result to get the more clear instance of pointer and scale
Param:
seg_results (list[dict]):segmentation results
erode_kernel (int): size of erode_kernel
Return:
eroded_results (list[dict]): the lab map of eroded_results
"""
kernel = np.ones((erode_kernel, erode_kernel), np.uint8)
eroded_results = seg_results
for i in range(len(seg_results)):
eroded_results[i] = cv2.erode(seg_results[i].astype(np.uint8), kernel)
return eroded_results
def circle_to_rectangle(seg_results):
"""
Switch the shape of label_map from circle to rectangle
Param:
seg_results (list[dict]):segmentation results
Return:
rectangle_meters (list[np.array]):the rectangle of label map
"""
rectangle_meters = list()
for i, seg_result in enumerate(seg_results):
label_map = seg_result
# The size of rectangle_meter is determined by RECTANGLE_HEIGHT and RECTANGLE_WIDTH
rectangle_meter = np.zeros((RECTANGLE_HEIGHT, RECTANGLE_WIDTH), dtype=np.uint8)
for row in range(RECTANGLE_HEIGHT):
for col in range(RECTANGLE_WIDTH):
theta = PI * 2 * (col + 1) / RECTANGLE_WIDTH
# The radius of meter circle will be mapped to the height of rectangle image
rho = CIRCLE_RADIUS - row - 1
y = int(CIRCLE_CENTER[0] + rho * math.cos(theta) + 0.5)
x = int(CIRCLE_CENTER[1] - rho * math.sin(theta) + 0.5)
rectangle_meter[row, col] = label_map[y, x]
rectangle_meters.append(rectangle_meter)
return rectangle_meters
def rectangle_to_line(rectangle_meters):
"""
Switch the dimension of rectangle label map from 2D to 1D
Param:
rectangle_meters (list[np.array]):2D rectangle OF label_map。
Return:
line_scales (list[np.array]): the list of scales value
line_pointers (list[np.array]):the list of pointers value
"""
line_scales = list()
line_pointers = list()
for rectangle_meter in rectangle_meters:
height, width = rectangle_meter.shape[0:2]
line_scale = np.zeros((width), dtype=np.uint8)
line_pointer = np.zeros((width), dtype=np.uint8)
for col in range(width):
for row in range(height):
if rectangle_meter[row, col] == SEG_LABEL["pointer"]:
line_pointer[col] += 1
elif rectangle_meter[row, col] == SEG_LABEL["scale"]:
line_scale[col] += 1
line_scales.append(line_scale)
line_pointers.append(line_pointer)
return line_scales, line_pointers
def mean_binarization(data_list):
"""
Binarize the data
Param:
data_list (list[np.array]):input data
Return:
binaried_data_list (list[np.array]):output data。
"""
batch_size = len(data_list)
binaried_data_list = data_list
for i in range(batch_size):
mean_data = np.mean(data_list[i])
width = data_list[i].shape[0]
for col in range(width):
if data_list[i][col] < mean_data:
binaried_data_list[i][col] = 0
else:
binaried_data_list[i][col] = 1
return binaried_data_list
def locate_scale(line_scales):
"""
Find location of center of each scale
Param:
line_scales (list[np.array]):the list of binaried scales value
Return:
scale_locations (list[list]):location of each scale
"""
batch_size = len(line_scales)
scale_locations = list()
for i in range(batch_size):
line_scale = line_scales[i]
width = line_scale.shape[0]
find_start = False
one_scale_start = 0
one_scale_end = 0
locations = list()
for j in range(width - 1):
if line_scale[j] > 0 and line_scale[j + 1] > 0:
if not find_start:
one_scale_start = j
find_start = True
if find_start:
if line_scale[j] == 0 and line_scale[j + 1] == 0:
one_scale_end = j - 1
one_scale_location = (one_scale_start + one_scale_end) / 2
locations.append(one_scale_location)
one_scale_start = 0
one_scale_end = 0
find_start = False
scale_locations.append(locations)
return scale_locations
def locate_pointer(line_pointers):
"""
Find location of center of pointer
Param:
line_scales (list[np.array]):the list of binaried pointer value
Return:
scale_locations (list[list]):location of pointer
"""
batch_size = len(line_pointers)
pointer_locations = list()
for i in range(batch_size):
line_pointer = line_pointers[i]
find_start = False
pointer_start = 0
pointer_end = 0
location = 0
width = line_pointer.shape[0]
for j in range(width - 1):
if line_pointer[j] > 0 and line_pointer[j + 1] > 0:
if not find_start:
pointer_start = j
find_start = True
if find_start:
if line_pointer[j] == 0 and line_pointer[j + 1] == 0:
pointer_end = j - 1
location = (pointer_start + pointer_end) / 2
find_start = False
break
pointer_locations.append(location)
return pointer_locations
def get_relative_location(scale_locations, pointer_locations):
"""
Match location of pointer and scales
Param:
scale_locations (list[list]):location of each scale
pointer_locations (list[list]):location of pointer
Return:
pointed_scales (list[dict]): a list of dict with:
'num_scales': total number of scales
'pointed_scale': predicted number of scales
"""
pointed_scales = list()
for scale_location, pointer_location in zip(scale_locations, pointer_locations):
num_scales = len(scale_location)
pointed_scale = -1
if num_scales > 0:
for i in range(num_scales - 1):
if scale_location[i] <= pointer_location < scale_location[i + 1]:
pointed_scale = i + (pointer_location - scale_location[i]) / (scale_location[i + 1] - scale_location[i] + 1e-05) + 1
result = {"num_scales": num_scales, "pointed_scale": pointed_scale}
pointed_scales.append(result)
return pointed_scales
def calculate_reading(pointed_scales):
"""
Calculate the value of meter according to the type of meter
Param:
pointed_scales (list[list]):predicted number of scales
Return:
readings (list[float]): the list of values read from meter
"""
readings = list()
batch_size = len(pointed_scales)
for i in range(batch_size):
pointed_scale = pointed_scales[i]
# find the type of meter according the total number of scales
if pointed_scale["num_scales"] > TYPE_THRESHOLD:
reading = pointed_scale["pointed_scale"] * METER_CONFIG[0]["scale_interval_value"]
else:
reading = pointed_scale["pointed_scale"] * METER_CONFIG[1]["scale_interval_value"]
readings.append(reading)
return readings
Main Function#
Initialize the model and parameters.#
select device from dropdown list for running inference using OpenVINO
device = device_widget()
device
Dropdown(description='Device:', index=1, options=('CPU', 'AUTO'), value='AUTO')
The number of detected meter from detection network can be arbitrary in
some scenarios, which means the batch size of segmentation network input
is a dynamic
dimension,
and it should be specified as -1 or the ov::Dimension() instead
of a positive number used for static dimensions. In this case, for
memory consumption optimization, we can specify the lower and/or upper
bounds of input batch size.
img_file = f"{DATA_DIR}/{IMG_FILE_NAME}"
det_model_path = f"{MODEL_DIR}/meter_det_model/model.pdmodel"
det_model_shape = {
"image": [1, 3, 608, 608],
"im_shape": [1, 2],
"scale_factor": [1, 2],
}
seg_model_path = f"{MODEL_DIR}/meter_seg_model/model.pdmodel"
seg_model_shape = {"image": [ov.Dimension(1, 2), 3, 512, 512]}
erode_kernel = 4
score_threshold = 0.5
seg_batch_size = 2
input_shape = 608
# Intialize the model objects
detector = Model(det_model_path, det_model_shape, device.value)
segmenter = Model(seg_model_path, seg_model_shape, device.value)
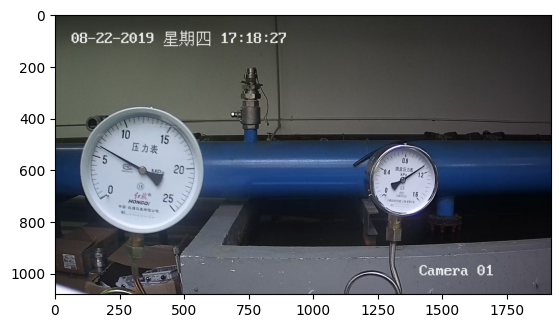
# Visulize a original input photo
image = cv2.imread(img_file)
rgb_image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.imshow(rgb_image)
<matplotlib.image.AxesImage at 0x7f1a979271f0>
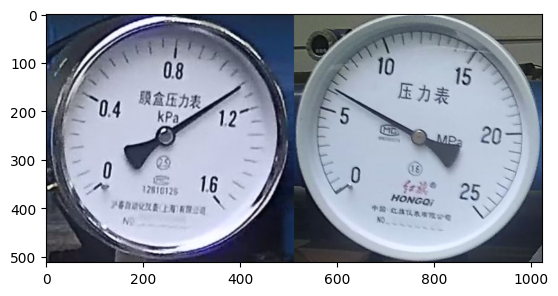
Run meter detection model#
Detect the location of the meter and prepare the ROI images for segmentation.
# Prepare the input data for meter detection model
im_shape = np.array([[input_shape, input_shape]]).astype("float32")
scale_factor = np.array([[1, 2]]).astype("float32")
input_image = det_preprocess(image, input_shape)
inputs_dict = {"image": input_image, "im_shape": im_shape, "scale_factor": scale_factor}
# Run meter detection model
det_results = detector.predict(inputs_dict)
# Filter out the bounding box with low confidence
filtered_results = filter_bboxes(det_results, score_threshold)
# Prepare the input data for meter segmentation model
scale_x = image.shape[1] / input_shape * 2
scale_y = image.shape[0] / input_shape
# Create the individual picture for each detected meter
roi_imgs, loc = roi_crop(image, filtered_results, scale_x, scale_y)
roi_imgs, resize_imgs = roi_process(roi_imgs, METER_SHAPE)
# Create the pictures of detection results
roi_stack = np.hstack(resize_imgs)
if cv2.imwrite(f"{DATA_DIR}/detection_results.jpg", roi_stack):
print('The detection result image has been saved as "detection_results.jpg" in data')
plt.imshow(cv2.cvtColor(roi_stack, cv2.COLOR_BGR2RGB))
The detection result image has been saved as "detection_results.jpg" in data
Run meter segmentation model#
Get the results of segmentation task on detected ROI.
seg_results = list()
mask_list = list()
num_imgs = len(roi_imgs)
# Run meter segmentation model on all detected meters
for i in range(0, num_imgs, seg_batch_size):
batch = roi_imgs[i : min(num_imgs, i + seg_batch_size)]
seg_result = segmenter.predict({"image": np.array(batch)})
seg_results.extend(seg_result)
results = []
for i in range(len(seg_results)):
results.append(np.argmax(seg_results[i], axis=0))
seg_results = erode(results, erode_kernel)
# Create the pictures of segmentation results
for i in range(len(seg_results)):
mask_list.append(segmentation_map_to_image(seg_results[i], COLORMAP))
mask_stack = np.hstack(mask_list)
if cv2.imwrite(f"{DATA_DIR}/segmentation_results.jpg", cv2.cvtColor(mask_stack, cv2.COLOR_RGB2BGR)):
print('The segmentation result image has been saved as "segmentation_results.jpg" in data')
plt.imshow(mask_stack)
The segmentation result image has been saved as "segmentation_results.jpg" in data
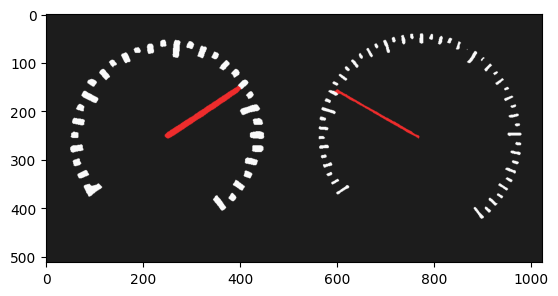
Postprocess the models result and calculate the final readings#
Use OpenCV function to find the location of the pointer in a scale map.
# Find the pointer location in scale map and calculate the meters reading
rectangle_meters = circle_to_rectangle(seg_results)
line_scales, line_pointers = rectangle_to_line(rectangle_meters)
binaried_scales = mean_binarization(line_scales)
binaried_pointers = mean_binarization(line_pointers)
scale_locations = locate_scale(binaried_scales)
pointer_locations = locate_pointer(binaried_pointers)
pointed_scales = get_relative_location(scale_locations, pointer_locations)
meter_readings = calculate_reading(pointed_scales)
rectangle_list = list()
# Plot the rectangle meters
for i in range(len(rectangle_meters)):
rectangle_list.append(segmentation_map_to_image(rectangle_meters[i], COLORMAP))
rectangle_meters_stack = np.hstack(rectangle_list)
if cv2.imwrite(
f"{DATA_DIR}/rectangle_meters.jpg",
cv2.cvtColor(rectangle_meters_stack, cv2.COLOR_RGB2BGR),
):
print('The rectangle_meters result image has been saved as "rectangle_meters.jpg" in data')
plt.imshow(rectangle_meters_stack)
The rectangle_meters result image has been saved as "rectangle_meters.jpg" in data

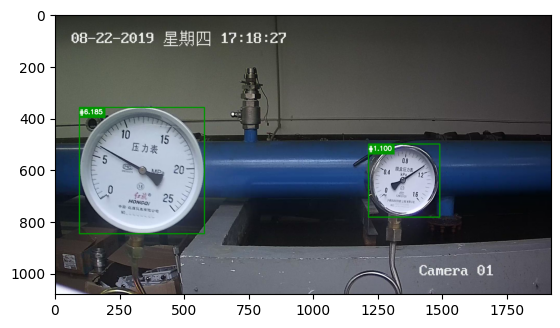
Get the reading result on the meter picture#
# Create a final result photo with reading
for i in range(len(meter_readings)):
print("Meter {}: {:.3f}".format(i + 1, meter_readings[i]))
result_image = image.copy()
for i in range(len(loc)):
cv2.rectangle(result_image, (loc[i][0], loc[i][1]), (loc[i][2], loc[i][3]), (0, 150, 0), 3)
font = cv2.FONT_HERSHEY_SIMPLEX
cv2.rectangle(
result_image,
(loc[i][0], loc[i][1]),
(loc[i][0] + 100, loc[i][1] + 40),
(0, 150, 0),
-1,
)
cv2.putText(
result_image,
"#{:.3f}".format(meter_readings[i]),
(loc[i][0], loc[i][1] + 25),
font,
0.8,
(255, 255, 255),
2,
cv2.LINE_AA,
)
if cv2.imwrite(f"{DATA_DIR}/reading_results.jpg", result_image):
print('The reading results image has been saved as "reading_results.jpg" in data')
plt.imshow(cv2.cvtColor(result_image, cv2.COLOR_BGR2RGB))
Meter 1: 1.100
Meter 2: 6.185
The reading results image has been saved as "reading_results.jpg" in data