Part Segmentation of 3D Point Clouds with OpenVINO™#
This Jupyter notebook can be launched on-line, opening an interactive environment in a browser window. You can also make a local installation. Choose one of the following options:



This notebook demonstrates how to process point cloud data and run 3D Part Segmentation with OpenVINO. We use the PointNet pre-trained model to detect each part of a chair and return its category.
PointNet#
PointNet was proposed by Charles Ruizhongtai Qi, a researcher at Stanford University in 2016: PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. The motivation behind the research is to classify and segment 3D representations of images. They use a data structure called point cloud, which is a set of points that represents a 3D shape or object. PointNet provides a unified architecture for applications ranging from object classification, part segmentation, to scene semantic parsing. It is highly efficient and effective, showing strong performance on par or even better than state of the art.
Table of contents:
Installation Instructions#
This is a self-contained example that relies solely on its own code.
We recommend running the notebook in a virtual environment. You only need a Jupyter server to start. For details, please refer to Installation Guide.
%pip install -q "openvino>=2023.1.0" "tqdm" "matplotlib>=3.4"
Note: you may need to restart the kernel to use updated packages.
Imports#
from pathlib import Path
from typing import Union
import numpy as np
import matplotlib.pyplot as plt
import openvino as ov
# Fetch `notebook_utils` module
import requests
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/notebook_utils.py",
)
open("notebook_utils.py", "w").write(r.text)
from notebook_utils import download_file, device_widget
Prepare the Model#
Download the pre-trained PointNet ONNX model. This pre-trained model is provided by axinc-ai, and you can find more point clouds examples here.
# Set the data and model directories, model source URL and model filename
MODEL_DIR = Path("model")
MODEL_DIR.mkdir(exist_ok=True)
download_file(
"https://storage.googleapis.com/ailia-models/pointnet_pytorch/chair_100.onnx",
directory=Path(MODEL_DIR),
show_progress=False,
)
onnx_model_path = MODEL_DIR / "chair_100.onnx"
Convert the ONNX model to OpenVINO IR. An OpenVINO IR (Intermediate
Representation) model consists of an .xml file, containing
information about network topology, and a .bin file, containing the
weights and biases binary data. Model conversion Python API is used for
conversion of ONNX model to OpenVINO IR. The ov.convert_model Python
function returns an OpenVINO model ready to load on a device and start
making predictions. We can save it on a disk for next usage with
ov.save_model. For more information about model conversion Python
API, see this
page.
ir_model_xml = onnx_model_path.with_suffix(".xml")
core = ov.Core()
if not ir_model_xml.exists():
# Convert model to OpenVINO Model
model = ov.convert_model(onnx_model_path)
# Serialize model in OpenVINO IR format xml + bin
ov.save_model(model, ir_model_xml)
else:
# Read model
model = core.read_model(model=ir_model_xml)
Data Processing Module#
def load_data(point_file: Union[str, Path]):
"""
Load the point cloud data and convert it to ndarray
Parameters:
point_file: string, path of .pts data
Returns:
point_set: point clound represented in np.array format
"""
point_set = np.loadtxt(point_file).astype(np.float32)
# normailization
point_set = point_set - np.expand_dims(np.mean(point_set, axis=0), 0) # center
dist = np.max(np.sqrt(np.sum(point_set**2, axis=1)), 0)
point_set = point_set / dist # scale
return point_set
def visualize(point_set: np.ndarray):
"""
Create a 3D view for data visualization
Parameters:
point_set: np.ndarray, the coordinate data in X Y Z format
"""
fig = plt.figure(dpi=192, figsize=(4, 4))
ax = fig.add_subplot(111, projection="3d")
X = point_set[:, 0]
Y = point_set[:, 2]
Z = point_set[:, 1]
# Scale the view of each axis to adapt to the coordinate data distribution
max_range = np.array([X.max() - X.min(), Y.max() - Y.min(), Z.max() - Z.min()]).max() * 0.5
mid_x = (X.max() + X.min()) * 0.5
mid_y = (Y.max() + Y.min()) * 0.5
mid_z = (Z.max() + Z.min()) * 0.5
ax.set_xlim(mid_x - max_range, mid_x + max_range)
ax.set_ylim(mid_y - max_range, mid_y + max_range)
ax.set_zlim(mid_z - max_range, mid_z + max_range)
plt.tick_params(labelsize=5)
ax.set_xlabel("X", fontsize=10)
ax.set_ylabel("Y", fontsize=10)
ax.set_zlabel("Z", fontsize=10)
return ax
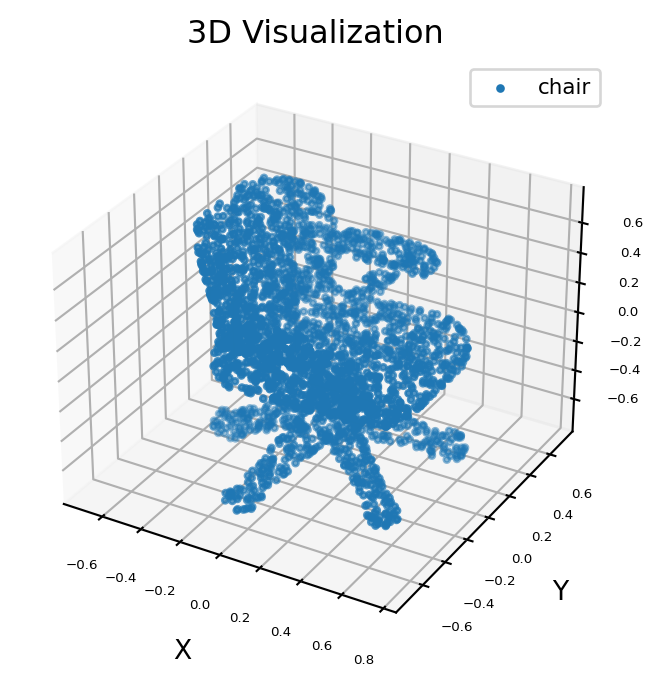
Visualize the original 3D data#
The point cloud data can be downloaded from ShapeNet, a large-scale dataset of 3D shapes. Here, we select the 3D data of a chair for example.
# Download data from the openvino_notebooks storage
point_data = download_file(
"https://storage.openvinotoolkit.org/repositories/openvino_notebooks/data/data/pts/chair.pts",
directory="data",
)
points = load_data(str(point_data))
X = points[:, 0]
Y = points[:, 2]
Z = points[:, 1]
ax = visualize(points)
ax.scatter3D(X, Y, Z, s=5, cmap="jet", marker="o", label="chair")
ax.set_title("3D Visualization")
plt.legend(loc="upper right", fontsize=8)
plt.show()
chair.pts: 0%| | 0.00/69.2k [00:00<?, ?B/s]
/tmp/ipykernel_2157242/2434168836.py:12: UserWarning: No data for colormapping provided via 'c'. Parameters 'cmap' will be ignored
ax.scatter3D(X, Y, Z, s=5, cmap="jet", marker="o", label="chair")
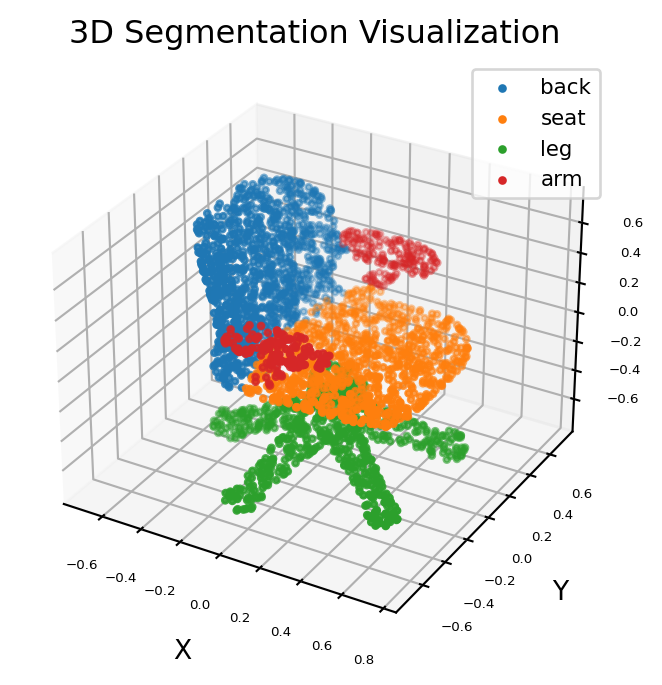
Run inference#
Run inference and visualize the results of 3D segmentation. - The input
data is a point cloud with 1 batch size,3 axis value (x, y,
z) and arbitrary number of points (dynamic shape). - The output data
is a mask with 1 batch size and 4 classification confidence for
each input point.
# Parts of a chair
classes = ["back", "seat", "leg", "arm"]
# Preprocess the input data
point = points.transpose(1, 0)
point = np.expand_dims(point, axis=0)
# Print info about model input and output shape
print(f"input shape: {model.input(0).partial_shape}")
print(f"output shape: {model.output(0).partial_shape}")
input shape: [1,3,?]
output shape: [1,?,4]
Select inference device#
select device from dropdown list for running inference using OpenVINO
device = device_widget()
device
Dropdown(description='Device:', index=1, options=('CPU', 'AUTO'), value='AUTO')
# Inference
compiled_model = core.compile_model(model=model, device_name=device.value)
output_layer = compiled_model.output(0)
result = compiled_model([point])[output_layer]
# Find the label map for all points of chair with highest confidence
pred = np.argmax(result[0], axis=1)
ax = visualize(point)
for i, name in enumerate([0, 1, 2, 3]):
XCur = []
YCur = []
ZCur = []
for j, nameCur in enumerate(pred):
if name == nameCur:
XCur.append(X[j])
YCur.append(Y[j])
ZCur.append(Z[j])
XCur = np.array(XCur)
YCur = np.array(YCur)
ZCur = np.array(ZCur)
# add current point of the part
ax.scatter(XCur, YCur, ZCur, s=5, cmap="jet", marker="o", label=classes[i])
ax.set_title("3D Segmentation Visualization")
plt.legend(loc="upper right", fontsize=8)
plt.show()
/tmp/ipykernel_2157242/2804603389.py:23: UserWarning: No data for colormapping provided via 'c'. Parameters 'cmap' will be ignored
ax.scatter(XCur, YCur, ZCur, s=5, cmap="jet", marker="o", label=classes[i])