Object masks from prompts with SAM2 and OpenVINO#
This Jupyter notebook can be launched after a local installation only.

Warning
Important note: This notebook requires python >= 3.10. Please make sure that your environment fulfill to this requirement before running it
Installation Instructions#
This is a self-contained example that relies solely on its own code.
We recommend running the notebook in a virtual environment. You only need a Jupyter server to start. For details, please refer to Installation Guide.
Table of contents:
Segmentation - identifying which image pixels belong to an object - is a core task in computer vision and is used in a broad array of applications, from analyzing scientific imagery to editing photos. But creating an accurate segmentation model for specific tasks typically requires highly specialized work by technical experts with access to AI training infrastructure and large volumes of carefully annotated in-domain data. Reducing the need for task-specific modeling expertise, training compute, and custom data annotation for image segmentation is the main goal of the Segment Anything project.
Segment Anything Model 2 (SAM 2) is a foundation model towards solving promptable visual segmentation in images and videos. It extend SAM to video by considering images as a video with a single frame. The SAM 2 model extends the promptable capability of SAM to the video domain by adding a per session memory module that captures information about the target object in the video. This allows SAM 2 to track the selected object throughout all video frames, even if the object temporarily disappears from view, as the model has context of the object from previous frames. SAM 2 also supports the ability to make corrections in the mask prediction based on additional prompts on any frame. SAM 2’s streaming architecture—which processes video frames one at a time—is also a natural generalization of SAM to the video domain. When SAM 2 is applied to images, the memory module is empty and the model behaves like SAM.
The model design is a simple transformer architecture with streaming memory for real-time video processing. The model is built a model-in-the-loop data engine, which improves model and data via user interaction, to collect SA-V dataset, the largest video segmentation dataset to date. SAM 2 provides strong performance across a wide range of tasks and visual domains. This notebook shows an example of how to convert and use Segment Anything Model 2 in OpenVINO format, allowing it to run on a variety of platforms that support an OpenVINO.
The diagram below demonstrates the SAM 2 architecture. For a given frame, the segmentation prediction is conditioned on the current prompt and/or on previously observed memories. Videos are processed in a streaming fashion with frames being consumed one at a time by the image encoder, and cross-attended to memories of the target object from previous frames. The mask decoder, which optionally also takes input prompts, predicts the segmentation mask for that frame. Finally, a memory encoder transforms the prediction and image encoder embeddings (not shown in the figure) for use in future frames
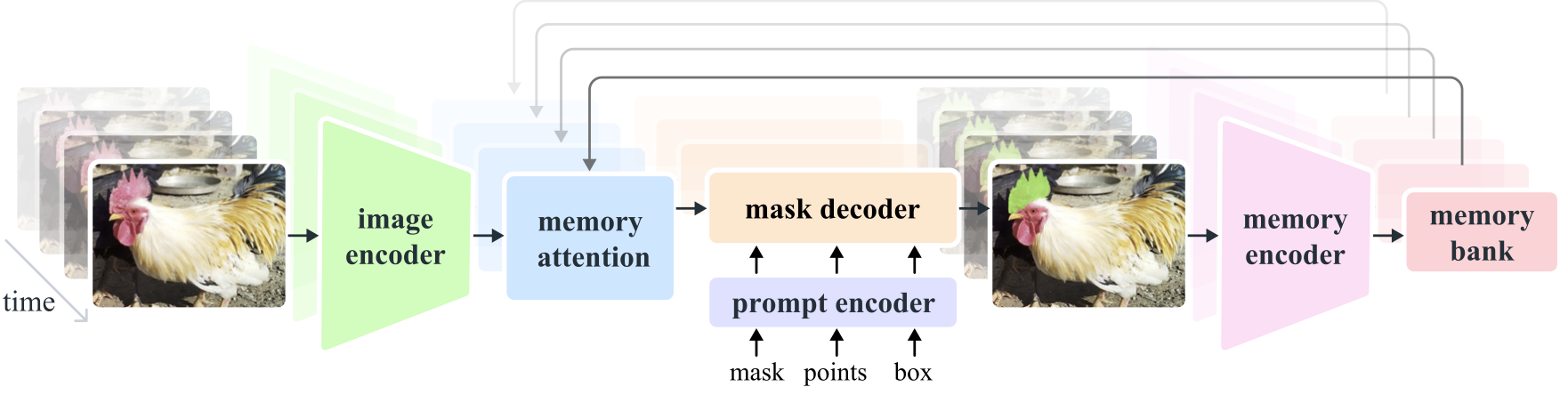
model_diagram#
More details about approach can be found in the paper, original repo and Meta AI blog post
Prerequisites#
%pip install -q "gradio>=4.13" "openvino>=2024.4.0" "nncf>=2.13" "torch>=2.3.1" "torchvision>=0.18.1" tqdm numpy --extra-index-url https://download.pytorch.org/whl/cpu
%pip install "iopath>=0.1.10" "pillow>=9.4.0" "hydra-core>=1.3.2"
%pip install -q "matplotlib>=3.4" "opencv-python"
Note: you may need to restart the kernel to use updated packages.
Requirement already satisfied: iopath>=0.1.10 in /opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/.venv/lib/python3.8/site-packages (0.1.10)
Requirement already satisfied: pillow>=9.4.0 in /opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/.venv/lib/python3.8/site-packages (10.4.0)
Requirement already satisfied: hydra-core>=1.3.2 in /opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/.venv/lib/python3.8/site-packages (1.3.2)
Requirement already satisfied: tqdm in /opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/.venv/lib/python3.8/site-packages (from iopath>=0.1.10) (4.67.1)
Requirement already satisfied: typing-extensions in /opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/.venv/lib/python3.8/site-packages (from iopath>=0.1.10) (4.12.2)
Requirement already satisfied: portalocker in /opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/.venv/lib/python3.8/site-packages (from iopath>=0.1.10) (3.0.0)
Requirement already satisfied: omegaconf<2.4,>=2.2 in /opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/.venv/lib/python3.8/site-packages (from hydra-core>=1.3.2) (2.3.0)
Requirement already satisfied: antlr4-python3-runtime==4.9.* in /opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/.venv/lib/python3.8/site-packages (from hydra-core>=1.3.2) (4.9.3)
Requirement already satisfied: packaging in /opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/.venv/lib/python3.8/site-packages (from hydra-core>=1.3.2) (24.2)
Requirement already satisfied: importlib-resources in /opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/.venv/lib/python3.8/site-packages (from hydra-core>=1.3.2) (6.4.5)
Requirement already satisfied: PyYAML>=5.1.0 in /opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/.venv/lib/python3.8/site-packages (from omegaconf<2.4,>=2.2->hydra-core>=1.3.2) (6.0.2)
Requirement already satisfied: zipp>=3.1.0 in /opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/.venv/lib/python3.8/site-packages (from importlib-resources->hydra-core>=1.3.2) (3.20.2)
Note: you may need to restart the kernel to use updated packages.
Note: you may need to restart the kernel to use updated packages.
import requests
from pathlib import Path
if not Path("notebook_utils.py").exists():
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/notebook_utils.py",
)
open("notebook_utils.py", "w").write(r.text)
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/cmd_helper.py",
)
open("cmd_helper.py", "w").write(r.text)
from notebook_utils import download_file
Clone and install segment-anything-2
from cmd_helper import clone_repo
clone_repo("https://github.com/facebookresearch/sam2.git", revision="0db838b11726893f151fa5826ecfa744e1a7760f")
PosixPath('sam2')
%env SAM2_BUILD_CUDA=0
%cd sam2
%pip install -q -e .
%cd ..
env: SAM2_BUILD_CUDA=0
/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/notebooks/sam2-video-segmentation/sam2
Note: switching to '0db838b11726893f151fa5826ecfa744e1a7760f'.
You are in 'detached HEAD' state. You can look around, make experimental
changes and commit them, and you can discard any commits you make in this
state without impacting any branches by switching back to a branch.
If you want to create a new branch to retain commits you create, you may
do so (now or later) by using -c with the switch command. Example:
git switch -c <new-branch-name>
Or undo this operation with:
git switch -
Turn off this advice by setting config variable advice.detachedHead to false
HEAD is now at 0db838b Merge pull request #205 from facebookresearch/haitham/fix_hf_image_predictor
ERROR: Package 'sam-2' requires a different Python: 3.8.10 not in '>=3.10.0'
Note: you may need to restart the kernel to use updated packages.
/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/notebooks/sam2-video-segmentation
ov_sam2_helper_file_name = "ov_sam2_helper.py"
if not Path(ov_sam2_helper_file_name).exists():
r = requests.get(
url=f"https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/notebooks/sam2-video-segmentation/{ov_sam2_helper_file_name}",
)
open(ov_sam2_helper_file_name, "w").write(r.text)
img_helper_file_name = "image_helper.py"
if not Path(ov_sam2_helper_file_name).exists():
r = requests.get(
url=f"https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/notebooks/sam2-video-segmentation/{img_helper_file_name}",
)
open(img_helper_file_name, "w").write(r.text)
Load the SAM2 PyTorch model#
SAM2 can be seen as a generalization of SAM to the video (and image) domain. SAM 2 supports point, box, and mask prompts on individual frames to define the spatial extent of the object to be segmented across the video. For image input, the model behaves similarly to SAM. A promptable and light-weight mask decoder accepts a frame embedding and prompts (if any) on the current frame and outputs a segmentation mask for the frame. Prompts can be iteratively added on a frame in order to refine the masks. Unlike SAM, the frame embedding used by the SAM 2 decoder is not directly from an image encoder and is instead conditioned on memories of past predictions and prompted frames. It is possible for prompted frames to also come “from the future” relative to the current frame. Memories of frames are created by the memory encoder based on the current prediction and placed in a memory bank for use in subsequent frames. The memory attention operation takes the per-frame embedding from the image encoder and conditions it on the memory bank to produce an embedding that is then passed to the mask decoder
For promptable segmentation and tracking in videos, SAM2 provides a video predictor with APIs for example to add prompts and propagate mask throughout a video. SAM 2 supports video inference on multiple objects and uses an inference state to keep track of the interactions in each video
We will use SAM2VideoPredictor class to load the model
sam2-hiera-large from
HuggingFace. List
of other SAM2 models could be found
here.
from sam2.sam2_video_predictor import SAM2VideoPredictor
predictor_video = SAM2VideoPredictor.from_pretrained("facebook/sam2-hiera-large", device="cpu")
Convert Model to OpenVINO IR#
We split model on 4 independent parts: image_encoder, mask_predictor, which combined of Prompt Encoder and Mask Decoder, memory encoder model and memory attention model.
import openvino as ov
core = ov.Core()
from notebook_utils import device_widget
device = device_widget()
device
Dropdown(description='Device:', index=1, options=('CPU', 'AUTO'), value='AUTO')
Load the parameters for model sam2_hiera_large from config.
Image Encoder Model#
The image encoder is only run once for the entire interaction and its role is to provide unconditioned tokens (feature embeddings) representing each frame.
Image Encoder input is tensor with shape 1x3x1024x1024 in NCHW
format, contains image for segmentation. Image Encoder output is visual
features, which includes: - backbone_fpn: image embeddings as tensor
with shape 1x256x64x64 and high resolution image embeddings as
tensors with shape 1x32x256x256, 1x64x128x128 -
vision_pos_enc - vision_features
from pathlib import Path
import warnings
import torch
from ov_sam2_helper import SamVideoFrameEncoderModel
ov_video_frame_encoder_path = Path("ov_video_image_encoder.xml")
if not ov_video_frame_encoder_path.exists():
with warnings.catch_warnings():
warnings.filterwarnings("ignore", category=torch.jit.TracerWarning)
warnings.filterwarnings("ignore", category=UserWarning)
video_frame_encoder_video = SamVideoFrameEncoderModel(predictor_video)
ov_video_frame_encoder_model = ov.convert_model(
video_frame_encoder_video,
example_input=torch.zeros(1, 3, 1024, 1024),
input=([1, 3, 1024, 1024],),
)
ov.save_model(ov_video_frame_encoder_model, ov_video_frame_encoder_path)
else:
ov_video_frame_encoder_model = core.read_model(ov_video_frame_encoder_path)
ov_video_frame_encoder_compl_model = core.compile_model(ov_video_frame_encoder_model, device.value)
Mask Prediction Model#
Mask prediction will be includes two models:
Prompt Encoder - Encoder for segmentation condition. As a condition can be used points, boxes or segmentation mask.
Mask Decoder - The mask decoder efficiently maps the image embedding, prompt embeddings, and an output token to a mask.
Combined prompt encoder and mask decoder model has following list of
inputs: - image_embeddings: The image embedding from image_encoder.
Has a batch index of length 1. - high_res_feats_256: The high
resolution embedding from image_encoder. Has a batch index of length 1.
- high_res_feats_128: The high resolution embedding from
image_encoder. Has a batch index of length 1. - point_coords:
Coordinates of sparse input prompts, corresponding to both point inputs
and box inputs. Boxes are encoded using two points, one for the top-left
corner and one for the bottom-right corner. Has a batch index of length
1. - point_labels: Labels for the sparse input prompts. 0 is a
negative input point, 1 is a positive input point, 2 is a top-left box
corner, 3 is a bottom-right box corner, and -1 is a padding point. *If
there is no box input, a single padding point with label -1 and
coordinates (0.0, 0.0) should be concatenated.
Model outputs: low_res_multimasks, high_res_multimasks, ious
- intersection over union predictions, low_res_masks - predicted
masks before postprocessing, can be used as mask input for model,
high_res_masks, obj_ptr, object_score_logits
from ov_sam2_helper import SamVideoMaskPredictorModel
ov_video_mask_pred_path = Path("ov_video_mask_predictor.xml")
if not ov_video_mask_pred_path.exists():
mask_pred_model = SamVideoMaskPredictorModel(predictor_video, multimask_output=False)
embed_dim = predictor_video.sam_prompt_encoder.embed_dim
embed_size = predictor_video.sam_prompt_encoder.image_embedding_size
dummy_inputs = {
"backbone_features": torch.randn(1, embed_dim, *embed_size, dtype=torch.float),
"high_res_feats_256": torch.randn(1, 32, 256, 256, dtype=torch.float),
"high_res_feats_128": torch.randn(1, 64, 128, 128, dtype=torch.float),
"point_coords": torch.randint(low=0, high=1024, size=(1, 5, 2), dtype=torch.float),
"point_labels": torch.randint(low=0, high=4, size=(1, 5), dtype=torch.float),
}
with warnings.catch_warnings():
warnings.filterwarnings("ignore", category=torch.jit.TracerWarning)
warnings.filterwarnings("ignore", category=UserWarning)
ov_video_mask_pred_model = ov.convert_model(mask_pred_model, example_input=dummy_inputs)
ov.save_model(ov_video_mask_pred_model, ov_video_mask_pred_path)
else:
ov_video_mask_pred_model = core.read_model(ov_video_mask_pred_path)
ov_video_mask_pred_compl_model = core.compile_model(ov_video_mask_pred_model, device.value)
Memory Encoder Model#
Predictions and embeddings from the image encoder for the frame are processed by the memory encoder and saved for future use. It holds the past predictions for the object and keeps track of prompts from the prompt encoder for relevant frames. The memory encoder generates a memory by down sampling the output mask using a convolutional module and summing it element-wise with the unconditioned frame embedding from the image-encoder, followed by light-weight convolutional layers to fuse the information.
Converted model has following list of inputs: pix_feat,
mask_for_mem, skip_mask_sigmoid
Model outputs: vision_features, vision_pos_enc
from ov_sam2_helper import SamVideoMemoryEncoderModel
ov_video_mem_encoder_path = Path("ov_video_mem_encoder.xml")
if not ov_video_mem_encoder_path.exists():
dummy_inputs = {
"pix_feat": torch.randn(1, 256, 64, 64, dtype=torch.float),
"mask_for_mem": torch.randn(1, 1, 1024, 1024, dtype=torch.float),
"skip_mask_sigmoid": torch.tensor(1),
}
with warnings.catch_warnings():
warnings.filterwarnings("ignore", category=torch.jit.TracerWarning)
warnings.filterwarnings("ignore", category=UserWarning)
video_mem_encoder_model = SamVideoMemoryEncoderModel(predictor_video)
ov_video_mem_encoder_model = ov.convert_model(video_mem_encoder_model, example_input=dummy_inputs)
ov.save_model(ov_video_mem_encoder_model, ov_video_mem_encoder_path)
else:
ov_video_mem_encoder_model = core.read_model(ov_video_mem_encoder_path)
ov_video_mem_encoder_compl_model = core.compile_model(ov_video_mem_encoder_model, device.value)
Memory Attention Model#
Memory attention aligns current frame features with past data such as features of frames and predictions and prompts, arranging transformer blocks where the first block extracts features. SAM2 stacks L transformer blocks, the first one taking the image encoding from the current frame as input. Each block performs self-attention, followed by cross-attention to memories of (prompted/unprompted) frames and object pointers (see below), stored in a memory bank (see below), followed by an MLP. We use vanilla attention operations for self- and cross-attention, allowing us to benefit from recent developments in efficient attention kernels.
Converted model has following list of inputs: - curr: self-attention
inputs - memory: cross-attention inputs - curr_pos: pos_enc
for self-attention inputs - memory_pos: pos_enc for
cross-attention inputs - num_obj_ptr_tokens: number of object
pointer tokens
Model outputs is normed_output
import yaml
sam2_config = "./sam2/sam2_configs/sam2_hiera_l.yaml"
with open(sam2_config, "r") as f:
model_info = yaml.safe_load(f)
Handling of complex tensors is supported only 2D rotations. So, let’s update the memory attention model to being able convert it.
from ov_sam2_helper import get_rotation_matrices, matrix_rope_forward
# Matrix version of rotary enc
# https://github.com/facebookresearch/segment-anything-2/issues/186
import types
funcType = types.MethodType
for layer in predictor_video.memory_attention.layers:
self_attn_feat_sizes = model_info["model"]["memory_attention"]["layer"]["self_attention"]["feat_sizes"]
self_attn_rope_theta = model_info["model"]["memory_attention"]["layer"]["self_attention"]["rope_theta"]
self_attn_rotmats = get_rotation_matrices(
dim=layer.self_attn.internal_dim // layer.self_attn.num_heads, end_x=self_attn_feat_sizes[0], end_y=self_attn_feat_sizes[1], theta=self_attn_rope_theta
)
setattr(layer.self_attn, "rotmats", self_attn_rotmats)
setattr(layer.self_attn, "rope_theta", self_attn_rope_theta)
layer.self_attn.forward = funcType(matrix_rope_forward, layer.self_attn)
cross_attn_feat_sizes = model_info["model"]["memory_attention"]["layer"]["self_attention"]["feat_sizes"]
cross_attn_rope_theta = model_info["model"]["memory_attention"]["layer"]["self_attention"]["rope_theta"]
cross_attn_rotmats = get_rotation_matrices(
dim=layer.cross_attn_image.internal_dim // layer.cross_attn_image.num_heads,
end_x=cross_attn_feat_sizes[0],
end_y=cross_attn_feat_sizes[1],
theta=cross_attn_rope_theta,
)
setattr(layer.cross_attn_image, "rotmats", cross_attn_rotmats)
setattr(layer.cross_attn_image, "rope_theta", cross_attn_rope_theta)
layer.cross_attn_image.forward = funcType(matrix_rope_forward, layer.cross_attn_image)
from ov_sam2_helper import SamVideoMemoryAttentionModel
ov_memory_attention_path = Path("ov_memory_attention_model.xml")
if not ov_memory_attention_path.exists():
dummy_inputs = {
"curr": torch.zeros(4096, 1, 256),
"curr_pos": torch.zeros(4096, 1, 256),
"memory": torch.zeros(4100, 1, 64),
"memory_pos": torch.zeros(4100, 1, 64),
"num_obj_ptr_tokens": torch.tensor(4),
}
memory_attention = SamVideoMemoryAttentionModel(predictor_video)
with warnings.catch_warnings():
warnings.filterwarnings("ignore", category=torch.jit.TracerWarning)
warnings.filterwarnings("ignore", category=UserWarning)
ov_memory_attention_model = ov.convert_model(
memory_attention,
example_input=dummy_inputs,
)
ov.save_model(ov_memory_attention_model, ov_memory_attention_path)
else:
ov_memory_attention_model = core.read_model(ov_memory_attention_path)
ov_memory_attention_comp_model = core.compile_model(ov_memory_attention_model, device.value)
Infer video prediction model in OpenVINO IR format#
To infer video we will use OVSAM2VideoPredictor.
OVSAM2VideoPredictor inherits SAM2VideoPredictor behavior, but
overloads some functions to use models converted to OpenVINO IR format.
memory_encoder_out_proj_weight_shape = None
if hasattr(predictor_video.memory_encoder, "out_proj") and hasattr(predictor_video.memory_encoder.out_proj, "weight"):
# if there is compression of memories along channel dim
memory_encoder_out_proj_weight_shape = predictor_video.memory_encoder.out_proj.weight.shape[0]
setattr(ov_memory_attention_comp_model, "d_model", predictor_video.memory_attention.d_model)
from ov_sam2_helper import OVSAM2VideoPredictor
ov_predictor_video = OVSAM2VideoPredictor.from_pretrained(
model_info=model_info,
ov_image_encoder=ov_video_frame_encoder_compl_model,
ov_mask_encoder=ov_video_mask_pred_compl_model,
ov_memory_encoder=ov_video_mem_encoder_compl_model,
ov_memory_attention_model=ov_memory_attention_comp_model,
memory_encoder_out_proj_weight_shape=memory_encoder_out_proj_weight_shape,
)
Prepare data#
sample_path = Path("data")
sample_path.mkdir(parents=True, exist_ok=True)
download_file(
"https://storage.openvinotoolkit.org/repositories/openvino_notebooks/data/data/video/Coco%20Walking%20in%20Berkeley.mp4",
directory=sample_path,
filename="coco.mp4",
)
coco.mp4: 0%| | 0.00/877k [00:00<?, ?B/s]
PosixPath('/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/notebooks/sam2-video-segmentation/data/coco.mp4')
SAM 2 requires stateful inference for interactive video segmentation, so
we need to initialize an inference state on this video. It could be
initialized with init_state(video_path). During initialization, it
loads all the JPEG frames in video_path and stores their pixels in
inference_state. If video is changed we will reset
inference_state_ov with reset_state(inference_state).
To give a prompt about the object we want to segment we will send
coordinates and labels to add_new_points_or_box API. Except
coordinates and labels we should specify inference_state, which was
initialized on the previous step, ann_frame_idx - the frame index we
interact with and ann_obj_id - a unique id to each object we
interact with, it can be any integers. Using different ann_obj_id we
could be segmented two or more objects in same time.
To get the masklet throughout the entire video, we propagate the prompts
using the propagate_in_video API.
SegmenterVideo is combined all this method to help make the
inference easier. In SegmenterVideo.set_video we load the video from
source, reset previous state and initialized state with new frames.
save_as_video method save segmented frames to mp4 video.
import shutil
import os
import cv2
import numpy as np
class SegmenterVideo:
def __init__(self, ov_predictor_video, max_frame_size=50, data_video_path="data_video"):
self.ov_predictor_video = ov_predictor_video
self.inference_state_ov = None
self.ann_frame_idx = 0
self.ann_obj_id = 1
self.video_segments = {}
# 0 all frames is needed
self.max_frame_size = max_frame_size
self.work_dir_path = data_video_path
self.width = None
self.height = None
def set_video(
self,
video_path,
):
if self.inference_state_ov:
self.ov_predictor_video.reset_state(self.inference_state_ov)
self.video_segments = {}
self.ann_frame_idx = 0
self.ann_obj_id = 1
vcap = cv2.VideoCapture(video_path)
self.width = vcap.get(cv2.CAP_PROP_FRAME_WIDTH)
self.height = vcap.get(cv2.CAP_PROP_FRAME_HEIGHT)
totalNoFrames = vcap.get(cv2.CAP_PROP_FRAME_COUNT)
max_frame_size = int(totalNoFrames) - 1 if self.max_frame_size == 0 or totalNoFrames < self.max_frame_size else self.max_frame_size
if os.path.exists(self.work_dir_path):
shutil.rmtree(self.work_dir_path)
os.mkdir(self.work_dir_path)
if vcap.isOpened():
rval, frame = vcap.read()
else:
rval = False
frame_idx = 0
while rval and frame_idx < max_frame_size:
rval, frame = vcap.read()
cv2.imwrite(os.path.join(self.work_dir_path, f"{frame_idx}.jpg"), frame)
frame_idx += 1
vcap.release()
self.inference_state_ov = self.ov_predictor_video.init_state(video_path=self.work_dir_path)
return video_path
def add_new_points_or_box(self, points=None, labels=None, box=None):
_, out_obj_ids, out_mask_logits = self.ov_predictor_video.add_new_points_or_box(
inference_state=self.inference_state_ov, frame_idx=self.ann_frame_idx, obj_id=self.ann_obj_id, points=points, labels=labels, box=box
)
return out_obj_ids, out_mask_logits
def propagate_in_video(self):
self.video_segments = {}
for (
out_frame_idx,
out_obj_ids,
out_mask_logits,
) in self.ov_predictor_video.propagate_in_video(self.inference_state_ov):
self.video_segments[out_frame_idx] = {out_obj_id: (out_mask_logits[i] > 0.0).cpu().numpy() for i, out_obj_id in enumerate(out_obj_ids)}
return self.video_segments
def save_as_video(self, output_filename="results.mp4"):
frame_names = [p for p in os.listdir(self.work_dir_path) if os.path.splitext(p)[-1] in [".jpg", ".jpeg", ".JPG", ".JPEG"]]
frame_names.sort(key=lambda p: int(os.path.splitext(p)[0]))
FOURCC = cv2.VideoWriter_fourcc(*"vp09")
out = cv2.VideoWriter(output_filename, FOURCC, 30, (int(self.width), int(self.height)))
color = np.random.randint(0, 255, size=(1, 1, 3))
for out_frame_idx in range(len(frame_names)):
img = cv2.imread(os.path.join(self.work_dir_path, frame_names[out_frame_idx]))
for out_obj_id, out_mask in self.video_segments[out_frame_idx].items():
out_mask = np.transpose(out_mask, (1, 2, 0))
out_img = img.copy()
out_img[out_mask.squeeze(-1)] = color
result = cv2.addWeighted(img.astype(np.float32), 0.7, out_img.astype(np.float32), 0.3, 0)
result = result.astype(np.uint8)
out.write(result)
cv2.destroyAllWindows()
out.release()
return output_filename
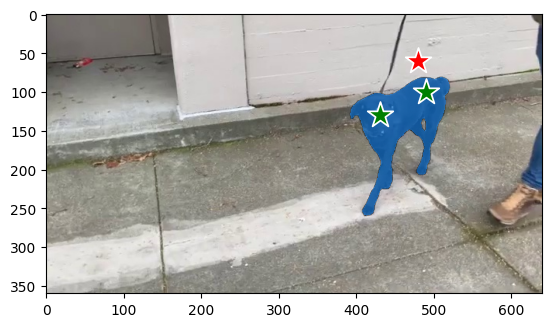
Example with points#
sample_path = Path("data")
segmenter_video = SegmenterVideo(ov_predictor_video, max_frame_size=25)
segmenter_video.set_video(sample_path / "coco.mp4")
frame loading (JPEG): 100%|██████████| 25/25 [00:00<00:00, 47.02it/s]
PosixPath('data/coco.mp4')
from image_helper import show_points, show_mask
import matplotlib.pyplot as plt
from PIL import Image
input_point = np.array([[430, 130], [490, 100], [480, 60]])
input_label = np.array([1, 1, 0])
out_obj_ids, out_mask_logits = segmenter_video.add_new_points_or_box(input_point, input_label)
frame_0 = Image.open(os.path.join(segmenter_video.work_dir_path, "0.jpg"))
plt.imshow(np.array(frame_0.convert("RGB")))
show_points(np.array(input_point), np.array(input_label), plt.gca())
show_mask((out_mask_logits[0] > 0.0).cpu().numpy(), plt.gca())
plt.show()
/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/notebooks/sam2-video-segmentation/sam2/sam2/sam2_video_predictor.py:873: UserWarning: cannot import name '_C' from 'sam2' (/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/notebooks/sam2-video-segmentation/sam2/sam2/__init__.py) Skipping the post-processing step due to the error above. You can still use SAM 2 and it's OK to ignore the error above, although some post-processing functionality may be limited (which doesn't affect the results in most cases; see facebookresearch/segment-anything-2). pred_masks_gpu = fill_holes_in_mask_scores(
res = segmenter_video.propagate_in_video()
propagate in video: 100%|██████████| 25/25 [03:34<00:00, 8.58s/it]
video_out_path = segmenter_video.save_as_video("point_results.mp4")
import IPython
IPython.display.Video(filename=video_out_path, embed=True)
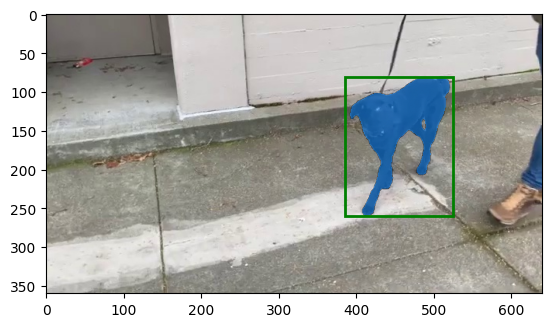
Example with box#
segmenter_video.set_video(sample_path / "coco.mp4")
frame loading (JPEG): 100%|██████████| 25/25 [00:00<00:00, 54.66it/s]
PosixPath('data/coco.mp4')
from image_helper import show_box
input_box = np.array([385, 80, 525, 260])
out_obj_ids, out_mask_logits = segmenter_video.add_new_points_or_box(box=input_box)
frame_0 = Image.open(os.path.join(segmenter_video.work_dir_path, "0.jpg"))
plt.imshow(np.array(frame_0.convert("RGB")))
show_mask((out_mask_logits[0] > 0.0).cpu().numpy(), plt.gca())
show_box(input_box, plt.gca())
plt.show()
res = segmenter_video.propagate_in_video()
propagate in video: 100%|██████████| 25/25 [03:37<00:00, 8.71s/it]
video_out_path = segmenter_video.save_as_video("box_results.mp4")
IPython.display.Video(filename=video_out_path, embed=True)
Run Interactive For Video Segmentation with Gradio#
if not Path("gradio_helper.py").exists():
r = requests.get(url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/notebooks/segment-anything/gradio_helper.py")
open("gradio_helper.py", "w").write(r.text)
from gradio_helper import make_video_demo
segmenter = SegmenterVideo(ov_predictor_video)
demo = make_video_demo(segmenter, sample_path)
try:
demo.launch(debug=False)
except Exception:
demo.launch(share=True, debug=False)
# If you are launching remotely, specify server_name and server_port
# EXAMPLE: `demo.launch(server_name="your server name", server_port="server port in int")`
# To learn more please refer to the Gradio docs: https://gradio.app/docs/
/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/835/archive/.workspace/scm/ov-notebook/.venv/lib/python3.8/site-packages/gradio/analytics.py:106: UserWarning: IMPORTANT: You are using gradio version 4.40.0, however version 4.44.1 is available, please upgrade.
--------
warnings.warn(
Running on local URL: http://127.0.0.1:7860 To create a public link, set share=True in launch().