Frame interpolation using FILM and OpenVINO¶
This Jupyter notebook can be launched after a local installation only.
Frame interpolation is the process of synthesizing in-between images from a given set of images. The technique is often used for temporal up-sampling to increase the refresh rate of videos or to create slow motion effects. Nowadays, with digital cameras and smartphones, we often take several photos within a few seconds to capture the best picture. Interpolating between these “near-duplicate” photos can lead to engaging videos that reveal scene motion, often delivering an even more pleasing sense of the moment than the original photos.

In “FILM: Frame Interpolation for Large Motion”, published at ECCV 2022, a method to create high quality slow-motion videos from near-duplicate photos is presented. FILM is a new neural network architecture that achieves state-of-the-art results in large motion, while also handling smaller motions well.
The FILM model takes two images as input and outputs a middle image. At inference time, the model is recursively invoked to output in-between images. FILM has three components: 1. Feature extractor that summarizes each input image with deep multi-scale (pyramid) features; 2. Bi-directional motion estimator that computes pixel-wise motion (i.e., flows) at each pyramid level; 3. Fusion module that outputs the final interpolated image.
FILM is trained on regular video frame triplets, with the middle frame serving as the ground-truth for supervision.
In this tutorial, we will use TensorFlow Hub as a model source.
NOTE: To run this tutorial, your system is required to have a VP9 video encoder. Ubuntu has it preinstalled, but for Windows, you should install it manually.
Table of contents:¶
Prerequisites¶
%pip install -q tensorflow tensorflow_hub numpy "opencv-python" tqdm matplotlib gradio Pillow "openvino>=2023.2.0"
[notice] A new release of pip is available: 23.2.1 -> 23.3.1
[notice] To update, run: pip install --upgrade pip
Note: you may need to restart the kernel to use updated packages.
WARNING: Skipping openvino as it is not installed.
Note: you may need to restart the kernel to use updated packages.
[notice] A new release of pip is available: 23.2.1 -> 23.3.1
[notice] To update, run: pip install --upgrade pip
Note: you may need to restart the kernel to use updated packages.
from pathlib import Path
from urllib.request import urlretrieve
from typing import Optional, Generator
from datetime import datetime
import gc
import tensorflow_hub as hub
import tensorflow as tf
import openvino as ov
import ipywidgets
import numpy as np
import cv2
import matplotlib.pyplot as plt
from tqdm.auto import tqdm
import gradio as gr
import PIL
import IPython
2023-11-02 11:23:42.519606: I tensorflow/core/util/port.cc:111] oneDNN custom operations are on. You may see slightly different numerical results due to floating-point round-off errors from different computation orders. To turn them off, set the environment variable TF_ENABLE_ONEDNN_OPTS=0. 2023-11-02 11:23:42.521340: I tensorflow/tsl/cuda/cudart_stub.cc:28] Could not find cuda drivers on your machine, GPU will not be used. 2023-11-02 11:23:42.549839: E tensorflow/compiler/xla/stream_executor/cuda/cuda_dnn.cc:9342] Unable to register cuDNN factory: Attempting to register factory for plugin cuDNN when one has already been registered 2023-11-02 11:23:42.549860: E tensorflow/compiler/xla/stream_executor/cuda/cuda_fft.cc:609] Unable to register cuFFT factory: Attempting to register factory for plugin cuFFT when one has already been registered 2023-11-02 11:23:42.549882: E tensorflow/compiler/xla/stream_executor/cuda/cuda_blas.cc:1518] Unable to register cuBLAS factory: Attempting to register factory for plugin cuBLAS when one has already been registered 2023-11-02 11:23:42.555392: I tensorflow/tsl/cuda/cudart_stub.cc:28] Could not find cuda drivers on your machine, GPU will not be used. 2023-11-02 11:23:42.556206: I tensorflow/core/platform/cpu_feature_guard.cc:182] This TensorFlow binary is optimized to use available CPU instructions in performance-critical operations. To enable the following instructions: AVX2 AVX512F AVX512_VNNI FMA, in other operations, rebuild TensorFlow with the appropriate compiler flags. 2023-11-02 11:23:43.247021: W tensorflow/compiler/tf2tensorrt/utils/py_utils.cc:38] TF-TRT Warning: Could not find TensorRT
MODEL_PATH = Path("models/model.xml")
DATA_PATH = Path("data")
IMAGES = {
"https://raw.githubusercontent.com/google-research/frame-interpolation/main/photos/one.png": Path("data/one.png"),
"https://raw.githubusercontent.com/google-research/frame-interpolation/main/photos/two.png": Path("data/two.png")
}
OUTPUT_VIDEO_PATH = DATA_PATH / "output.webm"
OV_OUTPUT_VIDEO_PATH = DATA_PATH / "ov_output.webm"
TIMES_TO_INTERPOLATE = 5
DATA_PATH.mkdir(parents=True, exist_ok=True)
PIL.ImageFile.LOAD_TRUNCATED_IMAGES = True # allows Gradio to read PNG images with large metadata
Prepare images¶
Download images and cast them to NumPy arrays to provide as model inputs.
def preprocess_np_frame(frame):
result = frame.astype(np.float32) / 255 # normalize to [0, 1]
result = result[np.newaxis, ...] # add batch dim
return result
def prepare_input(img_url: str):
if not IMAGES[img_url].exists():
urlretrieve(img_url, IMAGES[img_url])
filename = str(IMAGES[img_url])
img = cv2.imread(filename)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img = np.array(img)
img = preprocess_np_frame(img)
return img
input_images = [prepare_input(url) for url in IMAGES]
input = {
"x0": input_images[0],
"x1": input_images[1],
"time": np.array([[0.5]], dtype=np.float32)
}
plt.figure(figsize=(16, 8), layout="tight")
plt.subplot(1, 2, 1)
plt.imshow(input_images[0][0])
plt.axis("off")
plt.subplot(1, 2, 2)
plt.imshow(input_images[1][0])
plt.axis("off");

Load the model¶
Model is loaded using tensorflow_hub.KerasLayer function. Then, we
specify shapes of input tensors to cast loaded object to
tf.keras.Model class.
Input tensors are: - time - value between \([0,1]\) that says
where the generated image should be. \(0.5\) is midway between the
input images. - x0 - initial frame. - x1 - final frame.
For more details, see model page on TensorFlow Hub.
inputs = dict(
x0=tf.keras.layers.Input(shape=(None, None, 3)),
x1=tf.keras.layers.Input(shape=(None, None, 3)),
time=tf.keras.layers.Input(shape=(1)),
)
model_url = "https://www.kaggle.com/models/google/film/frameworks/tensorFlow2/variations/film/versions/1"
film_layer = hub.KerasLayer(model_url)(inputs)
film_model = tf.keras.Model(inputs=inputs, outputs=film_layer)
Infer the model¶
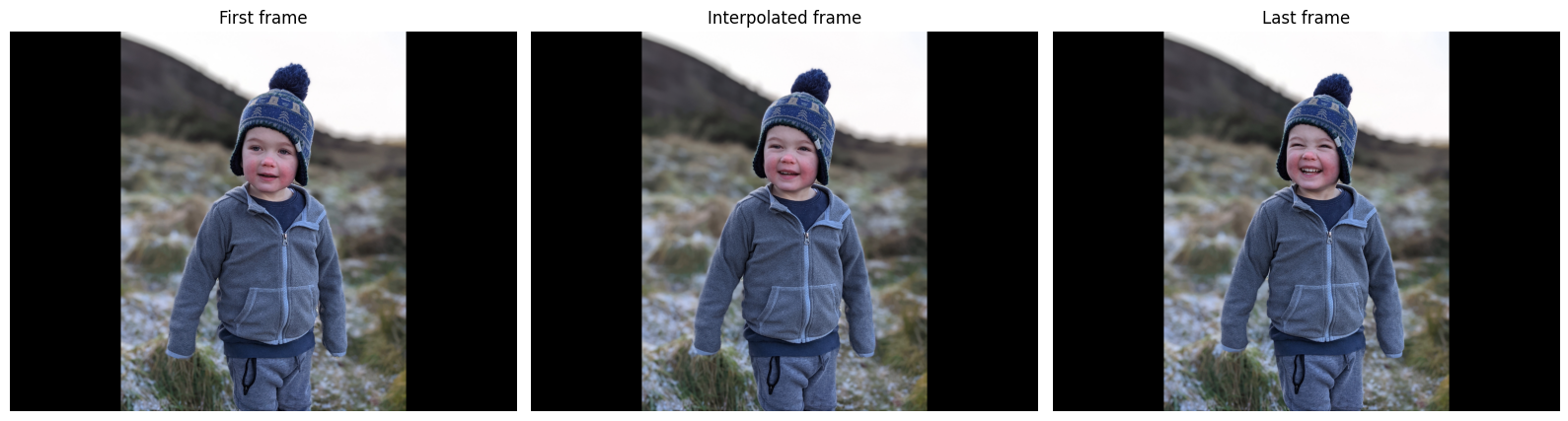
Single middle frame interpolation¶
output = film_model(input)
interpolated_image = output["image"][0]
interpolated_image = np.clip(interpolated_image, 0, 1)
def draw(img1, mid_img, img2):
title2img = {"First frame": img1, "Interpolated frame": mid_img, "Last frame": img2}
plt.figure(figsize=(16,8), layout="tight")
for i, (title, img) in enumerate(title2img.items()):
ax = plt.subplot(1, 3, i + 1)
ax.set_title(title)
plt.imshow(img)
plt.axis("off")
draw(input_images[0][0], interpolated_image, input_images[1][0])
Recursive frame generation¶
The process will take as input 2 original frames (first and last) and
generate a midpoint frame. Then, it will repeat itself for pairs “first
- midpoint”, “midpoint - last” to provide midpoints for them, and so on.
Recursion is executed \(t=\) times_to_interpolate times
generating \(2^t-1\) images.
class Interpolator:
def __init__(self, model):
self._model = model
def _recursive_generator(
self,
frame1: np.ndarray,
frame2: np.ndarray,
num_recursions: int,
bar: Optional[tqdm] = None,
) -> Generator[np.ndarray, None, None]:
"""Splits halfway to repeatedly generate more frames.
Args:
frame1: Input image 1.
frame2: Input image 2.
num_recursions: How many times to interpolate the consecutive image pairs.
Yields:
The interpolated frames, including the first frame (frame1), but excluding
the final frame2.
"""
if num_recursions == 0:
yield frame1
else:
time = np.array([[0.5]], dtype=np.float32)
mid_frame = self._model({"x0": frame1, "x1": frame2, "time": time})["image"]
if bar is not None:
bar.update(1)
yield from self._recursive_generator(frame1, mid_frame, num_recursions - 1, bar)
yield from self._recursive_generator(mid_frame, frame2, num_recursions - 1, bar)
def interpolate_recursively(
self, frame1: np.ndarray, frame2: np.ndarray, times_to_interpolate: int
) -> Generator[np.ndarray, None, None]:
"""Generates interpolated frames by repeatedly interpolating the midpoint.
Args:
frame1: Input image 1.
frame2: Input image 2.
times_to_interpolate: Number of times to do recursive midpoint
interpolation.
Yields:
The interpolated frames (including the inputs).
"""
num_frames = 2 ** (times_to_interpolate) - 1
bar = tqdm(total=num_frames)
yield from self._recursive_generator(frame1, frame2, times_to_interpolate, bar)
# Separately yield the final frame.
yield frame2
def save_as_video(frames: Generator[np.ndarray, None, None], width: int, height: int, filename: Path):
out = cv2.VideoWriter(str(filename), cv2.VideoWriter_fourcc(*'VP90'), 30, (width, height))
for frame in frames:
img = frame[0]
img = np.clip(img, 0, 1)
rgb_img = img * 255
rgb_img = rgb_img.astype(np.uint8)
bgr_img = cv2.cvtColor(rgb_img, cv2.COLOR_RGB2BGR)
out.write(bgr_img)
out.release()
height, width = input_images[0][0].shape[:2]
interpolator = Interpolator(film_model)
frames = interpolator.interpolate_recursively(input_images[0], input_images[1], TIMES_TO_INTERPOLATE)
save_as_video(frames, width, height, OUTPUT_VIDEO_PATH)
OpenCV: FFMPEG: tag 0x30395056/'VP90' is not supported with codec id 167 and format 'webm / WebM'
0%| | 0/31 [00:00<?, ?it/s]
IPython.display.Video(filename=OUTPUT_VIDEO_PATH, embed=True)
Convert the model to OpenVINO IR¶
To convert a TensorFlow Keras Model to OpenVINO Intermediate
Representation (IR), call the openvino.convert_model() function and
pass the model as the only argument. You can then serialize the model
object to disk using the openvino.save_model() function.
if not MODEL_PATH.exists():
converted_model = ov.convert_model(film_model)
ov.save_model(converted_model, MODEL_PATH)
del converted_model
del film_model
gc.collect()
100834
Inference¶
Select inference device¶
select device from dropdown list for running inference using OpenVINO
core = ov.Core()
device = ipywidgets.Dropdown(
options=core.available_devices + ["AUTO"],
value='AUTO',
description='Device:',
disabled=False,
)
device
Dropdown(description='Device:', index=4, options=('CPU', 'GPU.0', 'GPU.1', 'GPU.2', 'AUTO'), value='AUTO')
compiled_model = core.compile_model(MODEL_PATH, device.value)
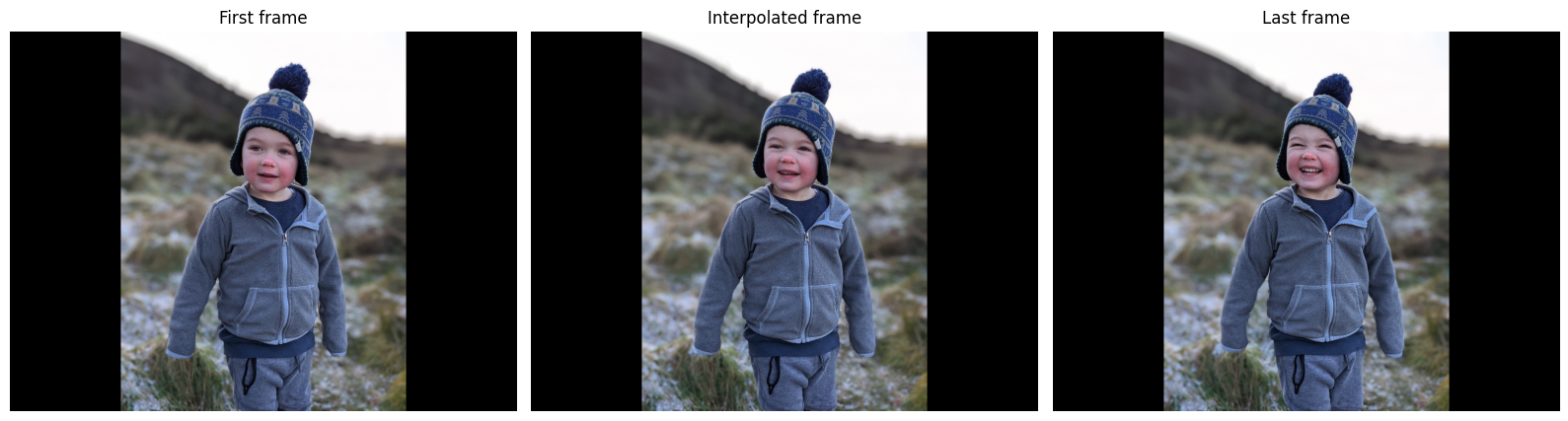
Single middle frame interpolation¶
Model output has multiple tensors, including auxiliary inference data. The main output tensor - interpolated image - is stored at “image” key.
result = compiled_model(input)["image"]
image = result[0]
image = np.clip(image, 0, 1)
Model returned intermediate image. Let’s see what it is.
draw(input_images[0][0], image, input_images[1][0])
Recursive frame generation¶
Now let’s create a smooth video by recursively generating frames between initial, middle and final images.
height, width = input_images[0][0].shape[:2]
ov_interpolator = Interpolator(compiled_model)
frames = ov_interpolator.interpolate_recursively(input_images[0], input_images[1], TIMES_TO_INTERPOLATE)
save_as_video(frames, width, height, OV_OUTPUT_VIDEO_PATH)
OpenCV: FFMPEG: tag 0x30395056/'VP90' is not supported with codec id 167 and format 'webm / WebM'
0%| | 0/31 [00:00<?, ?it/s]
IPython.display.Video(filename=OV_OUTPUT_VIDEO_PATH, embed=True)
Interactive inference¶
def generate(frame1, frame2, times_to_interpolate, _=gr.Progress(track_tqdm=True)):
x0, x1 = [preprocess_np_frame(frame) for frame in [frame1, frame2]]
frames = ov_interpolator.interpolate_recursively(x0, x1, times_to_interpolate)
height, width = frame1.shape[:2]
filename = DATA_PATH / f"output_{datetime.now().isoformat()}.webm"
save_as_video(frames, width, height, filename)
return filename
demo = gr.Interface(
generate,
[
gr.Image(label="First image"),
gr.Image(label="Last image"),
gr.Slider(1, 8, step=1, label="Times to interpolate", info="""Controls the number of times the frame interpolator is invoked.
The output will be the interpolation video with (2^value + 1) frames, fps of 30.""")
],
gr.Video(),
examples=[[*IMAGES.values(), 5]],
allow_flagging="never"
)
try:
demo.queue().launch(debug=False)
except Exception:
demo.queue().launch(share=True, debug=False)
# if you are launching remotely, specify server_name and server_port
# demo.launch(server_name='your server name', server_port='server port in int')
# Read more in the docs: https://gradio.app/docs/