Performance tricks in OpenVINO for latency mode¶
This Jupyter notebook can be launched after a local installation only.
The goal of this notebook is to provide a step-by-step tutorial for improving performance for inferencing in a latency mode. Low latency is especially desired in real-time applications when the results are needed as soon as possible after the data appears. This notebook assumes computer vision workflow and uses YOLOv5n model. We will simulate a camera application that provides frames one by one.
The performance tips applied in this notebook could be summarized in the
following figure. Some of the steps below can be applied to any device
at any stage, e.g., shared_memory; some can be used only to specific
devices, e.g., INFERENCE_NUM_THREADS to CPU. As the number of
potential configurations is vast, we recommend looking at the steps
below and then apply a trial-and-error approach. You can incorporate
many hints simultaneously, like more inference threads + shared memory.
It should give even better performance, but we recommend testing it
anyway.
NOTE: We especially recommend trying
OpenVINO IR model + CPU + shared memory in latency modeorOpenVINO IR model + CPU + shared memory + more inference threads.
The quantization and pre-post-processing API are not included here as they change the precision (quantization) or processing graph (prepostprocessor). You can find examples of how to apply them to optimize performance on OpenVINO IR files in 111-detection-quantization and 118-optimize-preprocessing.

NOTE: Many of the steps presented below will give you better performance. However, some of them may not change anything or even worsen the performance if they are strongly dependent on either the hardware or the model. Please run this notebook on your computer with your model to learn which of them makes sense in your case.
All the following tricks were run with OpenVINO 2023.0. Future versions of OpenVINO may include various optimizations that may result in different performance.
A similar notebook focused on the throughput mode is available here.
Table of contents:¶
Prerequisites¶
%pip install -q "openvino>=2023.1.0" seaborn "ultralytics<=8.0.178" onnx --extra-index-url https://download.pytorch.org/whl/cpu
Note: you may need to restart the kernel to use updated packages.
import os
import time
from pathlib import Path
from typing import Any, List, Tuple
# Fetch `notebook_utils` module
import urllib.request
urllib.request.urlretrieve(
url='https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/main/notebooks/utils/notebook_utils.py',
filename='notebook_utils.py'
)
import notebook_utils as utils
Data¶
We will use the same image of the dog sitting on a bicycle for all experiments below. The image is resized and preprocessed to fulfill the requirements of this particular object detection model.
import numpy as np
import cv2
IMAGE_WIDTH = 640
IMAGE_HEIGHT = 480
# load image
image = utils.load_image("https://storage.openvinotoolkit.org/repositories/openvino_notebooks/data/data/image/coco_bike.jpg")
image = cv2.resize(image, dsize=(IMAGE_WIDTH, IMAGE_HEIGHT), interpolation=cv2.INTER_AREA)
# preprocess it for YOLOv5
input_image = image / 255.0
input_image = np.transpose(input_image, axes=(2, 0, 1))
input_image = np.expand_dims(input_image, axis=0)
# show the image
utils.show_array(image)

<DisplayHandle display_id=c7531cff1487c41296f1ac25e2e96b93>
Model¶
We decided to go with YOLOv5n, one of the state-of-the-art object detection models, easily available through the PyTorch Hub and small enough to see the difference in performance.
import torch
from IPython.utils import io
# directory for all models
base_model_dir = Path("model")
model_name = "yolov5n"
model_path = base_model_dir / model_name
# load YOLOv5n from PyTorch Hub
pytorch_model = torch.hub.load("ultralytics/yolov5", "custom", path=model_path, device="cpu", skip_validation=True)
# don't print full model architecture
with io.capture_output():
pytorch_model.eval()
Using cache found in /opt/home/k8sworker/.cache/torch/hub/ultralytics_yolov5_master
YOLOv5 🚀 2023-4-21 Python-3.8.10 torch-2.1.0+cpu CPU
requirements: /opt/home/k8sworker/.cache/torch/hub/requirements.txt not found, check failed.
Downloading https://github.com/ultralytics/yolov5/releases/download/v7.0/yolov5n.pt to model/yolov5n.pt...
0%| | 0.00/3.87M [00:00<?, ?B/s]
7%|▋ | 272k/3.87M [00:00<00:01, 2.23MB/s]
19%|█▉ | 752k/3.87M [00:00<00:00, 3.64MB/s]
29%|██▉ | 1.13M/3.87M [00:00<00:00, 3.87MB/s]
39%|███▉ | 1.52M/3.87M [00:00<00:00, 3.61MB/s]
49%|████▉ | 1.89M/3.87M [00:00<00:00, 3.68MB/s]
61%|██████▏ | 2.38M/3.87M [00:00<00:00, 4.06MB/s]
72%|███████▏ | 2.77M/3.87M [00:00<00:00, 3.82MB/s]
83%|████████▎ | 3.23M/3.87M [00:00<00:00, 4.07MB/s]
94%|█████████▍| 3.63M/3.87M [00:01<00:00, 3.85MB/s]
100%|██████████| 3.87M/3.87M [00:01<00:00, 3.87MB/s]
Fusing layers...
YOLOv5n summary: 213 layers, 1867405 parameters, 0 gradients
Adding AutoShape...
Hardware¶
The code below lists the available hardware we will use in the benchmarking process.
NOTE: The hardware you have is probably completely different from ours. It means you can see completely different results.
import openvino as ov
# initialize OpenVINO
core = ov.Core()
# print available devices
for device in core.available_devices:
device_name = core.get_property(device, "FULL_DEVICE_NAME")
print(f"{device}: {device_name}")
CPU: Intel(R) Core(TM) i9-10920X CPU @ 3.50GHz
Helper functions¶
We’re defining a benchmark model function to use for all optimized models below. It runs inference 1000 times, averages the latency time, and prints two measures: seconds per image and frames per second (FPS).
INFER_NUMBER = 1000
def benchmark_model(model: Any, input_data: np.ndarray, benchmark_name: str, device_name: str = "CPU") -> float:
"""
Helper function for benchmarking the model. It measures the time and prints results.
"""
# measure the first inference separately - it may be slower as it contains also initialization
start = time.perf_counter()
model(input_data)
end = time.perf_counter()
first_infer_time = end - start
print(f"{benchmark_name} on {device_name}. First inference time: {first_infer_time :.4f} seconds")
# benchmarking
start = time.perf_counter()
for _ in range(INFER_NUMBER):
model(input_data)
end = time.perf_counter()
# elapsed time
infer_time = end - start
# print second per image and FPS
mean_infer_time = infer_time / INFER_NUMBER
mean_fps = INFER_NUMBER / infer_time
print(f"{benchmark_name} on {device_name}: {mean_infer_time :.4f} seconds per image ({mean_fps :.2f} FPS)")
return mean_infer_time
The following functions aim to post-process results and draw boxes on the image.
# https://gist.github.com/AruniRC/7b3dadd004da04c80198557db5da4bda
classes = [
"person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat", "traffic light", "fire hydrant",
"stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow", "elephant", "bear", "zebra",
"giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee", "skis", "snowboard", "sports ball", "kite",
"baseball bat", "baseball glove", "skateboard", "surfboard", "tennis racket", "bottle", "wine glass", "cup", "fork",
"knife", "spoon", "bowl", "banana", "apple", "sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut",
"cake", "chair", "couch", "potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote", "keyboard",
"cell phone", "microwave", "oven", "oaster", "sink", "refrigerator", "book", "clock", "vase", "scissors", "teddy bear",
"hair drier", "toothbrush"
]
# Colors for the classes above (Rainbow Color Map).
colors = cv2.applyColorMap(
src=np.arange(0, 255, 255 / len(classes), dtype=np.float32).astype(np.uint8),
colormap=cv2.COLORMAP_RAINBOW,
).squeeze()
def postprocess(detections: np.ndarray) -> List[Tuple]:
"""
Postprocess the raw results from the model.
"""
# candidates - probability > 0.25
detections = detections[detections[..., 4] > 0.25]
boxes = []
labels = []
scores = []
for obj in detections:
xmin, ymin, ww, hh = obj[:4]
score = obj[4]
label = np.argmax(obj[5:])
# Create a box with pixels coordinates from the box with normalized coordinates [0,1].
boxes.append(
tuple(map(int, (xmin - ww // 2, ymin - hh // 2, ww, hh)))
)
labels.append(int(label))
scores.append(float(score))
# Apply non-maximum suppression to get rid of many overlapping entities.
# See https://paperswithcode.com/method/non-maximum-suppression
# This algorithm returns indices of objects to keep.
indices = cv2.dnn.NMSBoxes(
bboxes=boxes, scores=scores, score_threshold=0.25, nms_threshold=0.5
)
# If there are no boxes.
if len(indices) == 0:
return []
# Filter detected objects.
return [(labels[idx], scores[idx], boxes[idx]) for idx in indices.flatten()]
def draw_boxes(img: np.ndarray, boxes):
"""
Draw detected boxes on the image.
"""
for label, score, box in boxes:
# Choose color for the label.
color = tuple(map(int, colors[label]))
# Draw a box.
x2 = box[0] + box[2]
y2 = box[1] + box[3]
cv2.rectangle(img=img, pt1=box[:2], pt2=(x2, y2), color=color, thickness=2)
# Draw a label name inside the box.
cv2.putText(
img=img,
text=f"{classes[label]} {score:.2f}",
org=(box[0] + 10, box[1] + 20),
fontFace=cv2.FONT_HERSHEY_COMPLEX,
fontScale=img.shape[1] / 1200,
color=color,
thickness=1,
lineType=cv2.LINE_AA,
)
def show_result(results: np.ndarray):
"""
Postprocess the raw results, draw boxes and show the image.
"""
output_img = image.copy()
detections = postprocess(results)
draw_boxes(output_img, detections)
utils.show_array(output_img)
Optimizations¶
Below, we present the performance tricks for faster inference in the latency mode. We release resources after every benchmarking to be sure the same amount of resource is available for every experiment.
PyTorch model¶
First, we’re benchmarking the original PyTorch model without any optimizations applied. We will treat it as our baseline.
import torch
with torch.no_grad():
result = pytorch_model(torch.as_tensor(input_image)).detach().numpy()[0]
show_result(result)
pytorch_infer_time = benchmark_model(pytorch_model, input_data=torch.as_tensor(input_image).float(), benchmark_name="PyTorch model")
PyTorch model on CPU. First inference time: 0.0280 seconds
PyTorch model on CPU: 0.0218 seconds per image (45.96 FPS)
ONNX model¶
The first optimization is exporting the PyTorch model to ONNX and running it in OpenVINO. It’s possible, thanks to the ONNX frontend. It means we don’t necessarily have to convert the model to Intermediate Representation (IR) to leverage the OpenVINO Runtime.
onnx_path = base_model_dir / Path(f"{model_name}_{IMAGE_WIDTH}_{IMAGE_HEIGHT}").with_suffix(".onnx")
# export PyTorch model to ONNX if it doesn't already exist
if not onnx_path.exists():
dummy_input = torch.randn(1, 3, IMAGE_HEIGHT, IMAGE_WIDTH)
torch.onnx.export(pytorch_model, dummy_input, onnx_path)
# load and compile in OpenVINO
onnx_model = core.read_model(onnx_path)
onnx_model = core.compile_model(onnx_model, device_name="CPU")
/opt/home/k8sworker/.cache/torch/hub/ultralytics_yolov5_master/models/common.py:514: TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
y = self.model(im, augment=augment, visualize=visualize) if augment or visualize else self.model(im)
/opt/home/k8sworker/.cache/torch/hub/ultralytics_yolov5_master/models/yolo.py:64: TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
if self.dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
result = onnx_model(input_image)[onnx_model.output(0)][0]
show_result(result)
onnx_infer_time = benchmark_model(model=onnx_model, input_data=input_image, benchmark_name="ONNX model")
del onnx_model # release resources
ONNX model on CPU. First inference time: 0.0174 seconds
ONNX model on CPU: 0.0136 seconds per image (73.63 FPS)
OpenVINO IR model¶
Let’s convert the ONNX model to OpenVINO Intermediate Representation (IR) FP16 and run it. Reducing the precision is one of the well-known methods for faster inference provided the hardware that supports lower precision, such as FP16 or even INT8. If the hardware doesn’t support lower precision, the model will be inferred in FP32 automatically. We could also use quantization (INT8), but we should experience a little accuracy drop. That’s why we skip that step in this notebook.
ov_model = ov.convert_model(onnx_path)
# save the model on disk
ov.save_model(ov_model, str(onnx_path.with_suffix(".xml")))
ov_cpu_model = core.compile_model(ov_model, device_name="CPU")
result = ov_cpu_model(input_image)[ov_cpu_model.output(0)][0]
show_result(result)
ov_cpu_infer_time = benchmark_model(model=ov_cpu_model, input_data=input_image, benchmark_name="OpenVINO model")
del ov_cpu_model # release resources
OpenVINO model on CPU. First inference time: 0.0153 seconds
OpenVINO model on CPU: 0.0122 seconds per image (82.17 FPS)
OpenVINO IR model on GPU¶
Usually, a GPU device is faster than a CPU, so let’s run the above model on the GPU. Please note you need to have an Intel GPU and install drivers to be able to run this step. In addition, offloading to the GPU helps reduce CPU load and memory consumption, allowing it to be left for routine processes. If you cannot observe a faster inference on GPU, it may be because the model is too light to benefit from massive parallel execution.
ov_gpu_infer_time = 0.0
if "GPU" in core.available_devices:
ov_gpu_model = core.compile_model(ov_model, device_name="GPU")
result = ov_gpu_model(input_image)[ov_gpu_model.output(0)][0]
show_result(result)
ov_gpu_infer_time = benchmark_model(model=ov_gpu_model, input_data=input_image, benchmark_name="OpenVINO model", device_name="GPU")
del ov_gpu_model # release resources
OpenVINO IR model + more inference threads¶
There is a possibility to add a config for any device (CPU in this case). We will increase the number of threads to an equal number of our cores. There are more options to be changed, so it’s worth playing with them to see what works best in our case. In some cases, this optimization may worsen the performance. If it is the case, don’t use it.
num_cores = os.cpu_count()
ov_cpu_config_model = core.compile_model(ov_model, device_name="CPU", config={"INFERENCE_NUM_THREADS": num_cores})
result = ov_cpu_config_model(input_image)[ov_cpu_config_model.output(0)][0]
show_result(result)
ov_cpu_config_infer_time = benchmark_model(model=ov_cpu_config_model, input_data=input_image, benchmark_name="OpenVINO model + more threads")
del ov_cpu_config_model # release resources
OpenVINO model + more threads on CPU. First inference time: 0.0150 seconds
OpenVINO model + more threads on CPU: 0.0122 seconds per image (81.82 FPS)
OpenVINO IR model in latency mode¶
OpenVINO offers a virtual device called
AUTO,
which can select the best device for us based on a performance hint.
There are three different hints: LATENCY, THROUGHPUT, and
CUMULATIVE_THROUGHPUT. As this notebook is focused on the latency
mode, we will use LATENCY. The above hints can be used with other
devices as well.
ov_auto_model = core.compile_model(ov_model, device_name="AUTO", config={"PERFORMANCE_HINT": "LATENCY"})
result = ov_auto_model(input_image)[ov_auto_model.output(0)][0]
show_result(result)
ov_auto_infer_time = benchmark_model(model=ov_auto_model, input_data=input_image, benchmark_name="OpenVINO model", device_name="AUTO")
OpenVINO model on AUTO. First inference time: 0.0153 seconds
OpenVINO model on AUTO: 0.0125 seconds per image (80.25 FPS)
OpenVINO IR model in latency mode + shared memory¶
OpenVINO is a C++ toolkit with Python wrappers (API). The default behavior in the Python API is copying the input to the additional buffer and then running processing in C++, which prevents many multiprocessing-related issues. However, it also increases time cost. We can create a tensor with enabled shared memory (keeping in mind we cannot overwrite our input), save time for copying and improve the performance!
# it must be assigned to a variable, not to be garbage collected
c_input_image = np.ascontiguousarray(input_image, dtype=np.float32)
input_tensor = ov.Tensor(c_input_image, shared_memory=True)
result = ov_auto_model(input_tensor)[ov_auto_model.output(0)][0]
show_result(result)
ov_auto_shared_infer_time = benchmark_model(model=ov_auto_model, input_data=input_tensor, benchmark_name="OpenVINO model + shared memory", device_name="AUTO")
del ov_auto_model # release resources
OpenVINO model + shared memory on AUTO. First inference time: 0.0113 seconds
OpenVINO model + shared memory on AUTO: 0.0054 seconds per image (186.01 FPS)
Other tricks¶
There are other tricks for performance improvement, such as quantization and pre-post-processing or dedicated to throughput mode. To get even more from your model, please visit 111-detection-quantization, 118-optimize-preprocessing, and 109-throughput-tricks.
Performance comparison¶
The following graphical comparison is valid for the selected model and hardware simultaneously. If you cannot see any improvement between some steps, just skip them.
%matplotlib inline
from matplotlib import pyplot as plt
labels = ["PyTorch model", "ONNX model", "OpenVINO IR model", "OpenVINO IR model on GPU", "OpenVINO IR model + more inference threads",
"OpenVINO IR model in latency mode", "OpenVINO IR model in latency mode + shared memory"]
# make them milliseconds
times = list(map(lambda x: 1000 * x, [pytorch_infer_time, onnx_infer_time, ov_cpu_infer_time, ov_gpu_infer_time, ov_cpu_config_infer_time,
ov_auto_infer_time, ov_auto_shared_infer_time]))
bar_colors = colors[::10] / 255.0
fig, ax = plt.subplots(figsize=(16, 8))
ax.bar(labels, times, color=bar_colors)
ax.set_ylabel("Inference time [ms]")
ax.set_title("Performance difference")
plt.xticks(rotation='vertical')
plt.show()
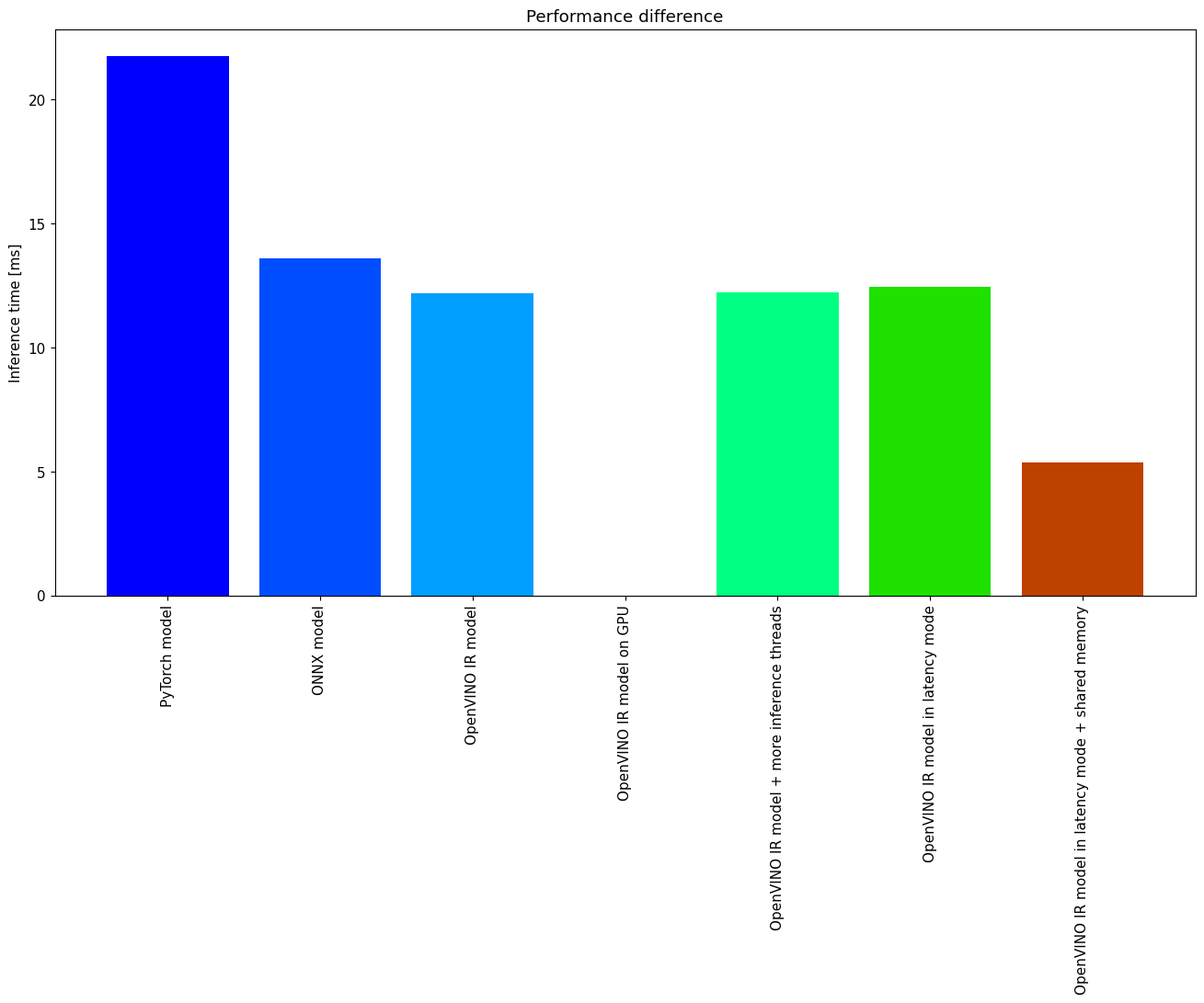
Conclusions¶
We already showed the steps needed to improve the performance of an
object detection model. Even if you experience much better performance
after running this notebook, please note this may not be valid for every
hardware or every model. For the most accurate results, please use
benchmark_app command-line
tool.
Note that benchmark_app cannot measure the impact of some tricks
above, e.g., shared memory.