Object masks from prompts with SAM and OpenVINO¶
This Jupyter notebook can be launched after a local installation only.
Table of contents:¶
Segmentation - identifying which image pixels belong to an object - is a core task in computer vision and is used in a broad array of applications, from analyzing scientific imagery to editing photos. But creating an accurate segmentation model for specific tasks typically requires highly specialized work by technical experts with access to AI training infrastructure and large volumes of carefully annotated in-domain data. Reducing the need for task-specific modeling expertise, training compute, and custom data annotation for image segmentation is the main goal of the Segment Anything project.
The Segment Anything Model (SAM) predicts object masks given prompts that indicate the desired object. SAM has learned a general notion of what objects are, and it can generate masks for any object in any image or any video, even including objects and image types that it had not encountered during training. SAM is general enough to cover a broad set of use cases and can be used out of the box on new image “domains” (e.g. underwater photos, MRI or cell microscopy) without requiring additional training (a capability often referred to as zero-shot transfer). This notebook shows an example of how to convert and use Segment Anything Model in OpenVINO format, allowing it to run on a variety of platforms that support an OpenVINO.
Background¶
Previously, to solve any kind of segmentation problem, there were two classes of approaches. The first, interactive segmentation, allowed for segmenting any class of object but required a person to guide the method by iterative refining a mask. The second, automatic segmentation, allowed for segmentation of specific object categories defined ahead of time (e.g., cats or chairs) but required substantial amounts of manually annotated objects to train (e.g., thousands or even tens of thousands of examples of segmented cats), along with the compute resources and technical expertise to train the segmentation model. Neither approach provided a general, fully automatic approach to segmentation.
Segment Anything Model is a generalization of these two classes of approaches. It is a single model that can easily perform both interactive segmentation and automatic segmentation. The Segment Anything Model (SAM) produces high quality object masks from input prompts such as points or boxes, and it can be used to generate masks for all objects in an image. It has been trained on a dataset of 11 million images and 1.1 billion masks, and has strong zero-shot performance on a variety of segmentation tasks. The model consists of 3 parts:
Image Encoder - Vision Transformer model (VIT) pretrained using Masked Auto Encoders approach (MAE) for encoding image to embedding space. The image encoder runs once per image and can be applied prior to prompting the model.
Prompt Encoder - Encoder for segmentation condition. As a condition can be used:
points - set of points related to object which should be segmented. Prompt encoder converts points to embedding using positional encoding.
boxes - bounding box where object for segmentation is located. Similar to points, coordinates of bounding box encoded via positional encoding.
segmentation mask - provided by user segmentation mask is embedded using convolutions and summed element-wise with the image embedding.
text - encoded by CLIP model text representation
Mask Decoder - The mask decoder efficiently maps the image embedding, prompt embeddings, and an output token to a mask.
The diagram below demonstrates the process of mask generation using SAM:
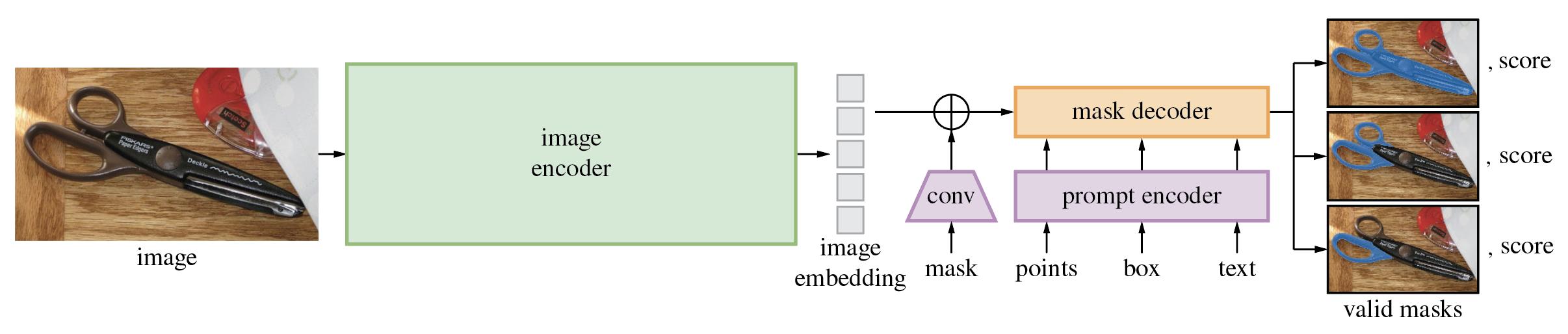
The model first converts the image into an image embedding that allows high quality masks to be efficiently produced from a prompt. The model returns multiple masks which fit to the provided prompt and its score. The provided masks can be overlapped areas as it shown on diagram, it is useful for complicated cases when prompt can be interpreted in different manner, e.g. segment whole object or only its specific part or when provided point at the intersection of multiple objects. The model’s promptable interface allows it to be used in flexible ways that make a wide range of segmentation tasks possible simply by engineering the right prompt for the model (clicks, boxes, text, and so on).
More details about approach can be found in the paper, original repo and Meta AI blog post
Prerequisites¶
%pip install -q "segment_anything" "gradio>=4.13" "openvino>=2023.1.0" "nncf>=2.5.0" "torch>=2.1" "torchvision>=0.16" --extra-index-url https://download.pytorch.org/whl/cpu
Convert model to OpenVINO Intermediate Representation¶
Download model checkpoint and create PyTorch model¶
There are several Segment Anything Model
checkpoints
available for downloading In this tutorial we will use model based on
vit_b, but the demonstrated approach is very general and applicable
to other SAM models. Set the model URL, path for saving checkpoint and
model type below to a SAM model checkpoint, then load the model using
sam_model_registry.
import sys
sys.path.append("../utils")
from notebook_utils import download_file
checkpoint = "sam_vit_b_01ec64.pth"
model_url = "https://dl.fbaipublicfiles.com/segment_anything/sam_vit_b_01ec64.pth"
model_type = "vit_b"
download_file(model_url)
'sam_vit_b_01ec64.pth' already exists.
PosixPath('/home/ea/work/openvino_notebooks/notebooks/237-segment-anything/sam_vit_b_01ec64.pth')
from segment_anything import sam_model_registry
sam = sam_model_registry[model_type](checkpoint=checkpoint)
As we already discussed, Image Encoder part can be used once per image, then changing prompt, prompt encoder and mask decoder can be run multiple times to retrieve different objects from the same image. Taking into account this fact, we split model on 2 independent parts: image_encoder and mask_predictor (combination of Prompt Encoder and Mask Decoder).
Image Encoder¶
Image Encoder input is tensor with shape 1x3x1024x1024 in NCHW
format, contains image for segmentation. Image Encoder output is image
embeddings, tensor with shape 1x256x64x64
import warnings
from pathlib import Path
import torch
import openvino as ov
core = ov.Core()
ov_encoder_path = Path("sam_image_encoder.xml")
if not ov_encoder_path.exists():
with warnings.catch_warnings():
warnings.filterwarnings("ignore", category=torch.jit.TracerWarning)
warnings.filterwarnings("ignore", category=UserWarning)
ov_encoder_model = ov.convert_model(sam.image_encoder, example_input=torch.zeros(1,3,1024,1024), input=([1,3,1024,1024],))
ov.save_model(ov_encoder_model, ov_encoder_path)
else:
ov_encoder_model = core.read_model(ov_encoder_path)
import ipywidgets as widgets
device = widgets.Dropdown(
options=core.available_devices + ["AUTO"],
value='AUTO',
description='Device:',
disabled=False,
)
device
Dropdown(description='Device:', index=2, options=('CPU', 'GPU', 'AUTO'), value='AUTO')
ov_encoder = core.compile_model(ov_encoder_model, device.value)
Mask predictor¶
This notebook expects the model was exported with the parameter
return_single_mask=True. It means that model will only return the
best mask, instead of returning multiple masks. For high resolution
images this can improve runtime when upscaling masks is expensive.
Combined prompt encoder and mask decoder model has following list of inputs:
image_embeddings: The image embedding fromimage_encoder. Has a batch index of length 1.point_coords: Coordinates of sparse input prompts, corresponding to both point inputs and box inputs. Boxes are encoded using two points, one for the top-left corner and one for the bottom-right corner. Coordinates must already be transformed to long-side 1024. Has a batch index of length 1.point_labels: Labels for the sparse input prompts. 0 is a negative input point, 1 is a positive input point, 2 is a top-left box corner, 3 is a bottom-right box corner, and -1 is a padding point. *If there is no box input, a single padding point with label -1 and coordinates (0.0, 0.0) should be concatenated.
Model outputs:
masks- predicted masks resized to original image size, to obtain a binary mask, should be compared withthreshold(usually equal 0.0).iou_predictions- intersection over union predictionslow_res_masks- predicted masks before postprocessing, can be used as mask input for model.
from typing import Tuple
class SamExportableModel(torch.nn.Module):
def __init__(
self,
model,
return_single_mask: bool,
use_stability_score: bool = False,
return_extra_metrics: bool = False,
) -> None:
super().__init__()
self.mask_decoder = model.mask_decoder
self.model = model
self.img_size = model.image_encoder.img_size
self.return_single_mask = return_single_mask
self.use_stability_score = use_stability_score
self.stability_score_offset = 1.0
self.return_extra_metrics = return_extra_metrics
def _embed_points(self, point_coords: torch.Tensor, point_labels: torch.Tensor) -> torch.Tensor:
point_coords = point_coords + 0.5
point_coords = point_coords / self.img_size
point_embedding = self.model.prompt_encoder.pe_layer._pe_encoding(point_coords)
point_labels = point_labels.unsqueeze(-1).expand_as(point_embedding)
point_embedding = point_embedding * (point_labels != -1).to(torch.float32)
point_embedding = point_embedding + self.model.prompt_encoder.not_a_point_embed.weight * (
point_labels == -1
).to(torch.float32)
for i in range(self.model.prompt_encoder.num_point_embeddings):
point_embedding = point_embedding + self.model.prompt_encoder.point_embeddings[
i
].weight * (point_labels == i).to(torch.float32)
return point_embedding
def t_embed_masks(self, input_mask: torch.Tensor) -> torch.Tensor:
mask_embedding = self.model.prompt_encoder.mask_downscaling(input_mask)
return mask_embedding
def mask_postprocessing(self, masks: torch.Tensor) -> torch.Tensor:
masks = torch.nn.functional.interpolate(
masks,
size=(self.img_size, self.img_size),
mode="bilinear",
align_corners=False,
)
return masks
def select_masks(
self, masks: torch.Tensor, iou_preds: torch.Tensor, num_points: int
) -> Tuple[torch.Tensor, torch.Tensor]:
# Determine if we should return the multiclick mask or not from the number of points.
# The reweighting is used to avoid control flow.
score_reweight = torch.tensor(
[[1000] + [0] * (self.model.mask_decoder.num_mask_tokens - 1)]
).to(iou_preds.device)
score = iou_preds + (num_points - 2.5) * score_reweight
best_idx = torch.argmax(score, dim=1)
masks = masks[torch.arange(masks.shape[0]), best_idx, :, :].unsqueeze(1)
iou_preds = iou_preds[torch.arange(masks.shape[0]), best_idx].unsqueeze(1)
return masks, iou_preds
@torch.no_grad()
def forward(
self,
image_embeddings: torch.Tensor,
point_coords: torch.Tensor,
point_labels: torch.Tensor,
mask_input: torch.Tensor = None,
):
sparse_embedding = self._embed_points(point_coords, point_labels)
if mask_input is None:
dense_embedding = self.model.prompt_encoder.no_mask_embed.weight.reshape(1, -1, 1, 1).expand(
point_coords.shape[0], -1, image_embeddings.shape[0], 64
)
else:
dense_embedding = self._embed_masks(mask_input)
masks, scores = self.model.mask_decoder.predict_masks(
image_embeddings=image_embeddings,
image_pe=self.model.prompt_encoder.get_dense_pe(),
sparse_prompt_embeddings=sparse_embedding,
dense_prompt_embeddings=dense_embedding,
)
if self.use_stability_score:
scores = calculate_stability_score(
masks, self.model.mask_threshold, self.stability_score_offset
)
if self.return_single_mask:
masks, scores = self.select_masks(masks, scores, point_coords.shape[1])
upscaled_masks = self.mask_postprocessing(masks)
if self.return_extra_metrics:
stability_scores = calculate_stability_score(
upscaled_masks, self.model.mask_threshold, self.stability_score_offset
)
areas = (upscaled_masks > self.model.mask_threshold).sum(-1).sum(-1)
return upscaled_masks, scores, stability_scores, areas, masks
return upscaled_masks, scores
ov_model_path = Path("sam_mask_predictor.xml")
if not ov_model_path.exists():
exportable_model = SamExportableModel(sam, return_single_mask=True)
embed_dim = sam.prompt_encoder.embed_dim
embed_size = sam.prompt_encoder.image_embedding_size
dummy_inputs = {
"image_embeddings": torch.randn(1, embed_dim, *embed_size, dtype=torch.float),
"point_coords": torch.randint(low=0, high=1024, size=(1, 5, 2), dtype=torch.float),
"point_labels": torch.randint(low=0, high=4, size=(1, 5), dtype=torch.float),
}
with warnings.catch_warnings():
warnings.filterwarnings("ignore", category=torch.jit.TracerWarning)
warnings.filterwarnings("ignore", category=UserWarning)
ov_model = ov.convert_model(exportable_model, example_input=dummy_inputs)
ov.save_model(ov_model, ov_model_path)
else:
ov_model = core.read_model(ov_model_path)
device
Dropdown(description='Device:', index=2, options=('CPU', 'GPU', 'AUTO'), value='AUTO')
ov_predictor = core.compile_model(ov_model, device.value)
Run OpenVINO model in interactive segmentation mode¶
Example Image¶
import numpy as np
import cv2
import matplotlib.pyplot as plt
download_file("https://raw.githubusercontent.com/facebookresearch/segment-anything/main/notebooks/images/truck.jpg")
image = cv2.imread('truck.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
'truck.jpg' already exists.
plt.figure(figsize=(10,10))
plt.imshow(image)
plt.axis('off')
plt.show()

Preprocessing and visualization utilities¶
To prepare input for Image Encoder we should:
Convert BGR image to RGB
Resize image saving aspect ratio where longest size equal to Image Encoder input size - 1024.
Normalize image subtract mean values (123.675, 116.28, 103.53) and divide by std (58.395, 57.12, 57.375)
Transpose HWC data layout to CHW and add batch dimension.
Add zero padding to input tensor by height or width (depends on aspect ratio) according Image Encoder expected input shape.
These steps are applicable to all available models
from copy import deepcopy
from typing import Tuple
from torchvision.transforms.functional import resize, to_pil_image
class ResizeLongestSide:
"""
Resizes images to longest side 'target_length', as well as provides
methods for resizing coordinates and boxes. Provides methods for
transforming numpy arrays.
"""
def __init__(self, target_length: int) -> None:
self.target_length = target_length
def apply_image(self, image: np.ndarray) -> np.ndarray:
"""
Expects a numpy array with shape HxWxC in uint8 format.
"""
target_size = self.get_preprocess_shape(image.shape[0], image.shape[1], self.target_length)
return np.array(resize(to_pil_image(image), target_size))
def apply_coords(self, coords: np.ndarray, original_size: Tuple[int, ...]) -> np.ndarray:
"""
Expects a numpy array of length 2 in the final dimension. Requires the
original image size in (H, W) format.
"""
old_h, old_w = original_size
new_h, new_w = self.get_preprocess_shape(
original_size[0], original_size[1], self.target_length
)
coords = deepcopy(coords).astype(float)
coords[..., 0] = coords[..., 0] * (new_w / old_w)
coords[..., 1] = coords[..., 1] * (new_h / old_h)
return coords
def apply_boxes(self, boxes: np.ndarray, original_size: Tuple[int, ...]) -> np.ndarray:
"""
Expects a numpy array shape Bx4. Requires the original image size
in (H, W) format.
"""
boxes = self.apply_coords(boxes.reshape(-1, 2, 2), original_size)
return boxes.reshape(-1, 4)
@staticmethod
def get_preprocess_shape(oldh: int, oldw: int, long_side_length: int) -> Tuple[int, int]:
"""
Compute the output size given input size and target long side length.
"""
scale = long_side_length * 1.0 / max(oldh, oldw)
newh, neww = oldh * scale, oldw * scale
neww = int(neww + 0.5)
newh = int(newh + 0.5)
return (newh, neww)
resizer = ResizeLongestSide(1024)
def preprocess_image(image: np.ndarray):
resized_image = resizer.apply_image(image)
resized_image = (resized_image.astype(np.float32) - [123.675, 116.28, 103.53]) / [58.395, 57.12, 57.375]
resized_image = np.expand_dims(np.transpose(resized_image, (2, 0, 1)).astype(np.float32), 0)
# Pad
h, w = resized_image.shape[-2:]
padh = 1024 - h
padw = 1024 - w
x = np.pad(resized_image, ((0, 0), (0, 0), (0, padh), (0, padw)))
return x
def postprocess_masks(masks: np.ndarray, orig_size):
size_before_pad = resizer.get_preprocess_shape(orig_size[0], orig_size[1], masks.shape[-1])
masks = masks[..., :int(size_before_pad[0]), :int(size_before_pad[1])]
masks = torch.nn.functional.interpolate(torch.from_numpy(masks), size=orig_size, mode="bilinear", align_corners=False).numpy()
return masks
def show_mask(mask, ax):
color = np.array([30 / 255, 144 / 255, 255 / 255, 0.6])
h, w = mask.shape[-2:]
mask_image = mask.reshape(h, w, 1) * color.reshape(1, 1, -1)
ax.imshow(mask_image)
def show_points(coords, labels, ax, marker_size=375):
pos_points = coords[labels == 1]
neg_points = coords[labels == 0]
ax.scatter(pos_points[:, 0], pos_points[:, 1], color='green', marker='*', s=marker_size, edgecolor='white', linewidth=1.25)
ax.scatter(neg_points[:, 0], neg_points[:, 1], color='red', marker='*', s=marker_size, edgecolor='white', linewidth=1.25)
def show_box(box, ax):
x0, y0 = box[0], box[1]
w, h = box[2] - box[0], box[3] - box[1]
ax.add_patch(plt.Rectangle((x0, y0), w, h, edgecolor='green', facecolor=(0, 0, 0, 0), lw=2))
Image encoding¶
To start work with image, we should preprocess it and obtain image
embeddings using ov_encoder. We will use the same image for all
experiments, so it is possible to generate image embedding once and then
reuse them.
preprocessed_image = preprocess_image(image)
encoding_results = ov_encoder(preprocessed_image)
image_embeddings = encoding_results[ov_encoder.output(0)]
Now, we can try to provide different prompts for mask generation
Example point input¶
In this example we select one point. The green star symbol show its location on the image below.
input_point = np.array([[500, 375]])
input_label = np.array([1])
plt.figure(figsize=(10,10))
plt.imshow(image)
show_points(input_point, input_label, plt.gca())
plt.axis('off')
plt.show()

Add a batch index, concatenate a padding point, and transform it to input tensor coordinate system.
coord = np.concatenate([input_point, np.array([[0.0, 0.0]])], axis=0)[None, :, :]
label = np.concatenate([input_label, np.array([-1])], axis=0)[None, :].astype(np.float32)
coord = resizer.apply_coords(coord, image.shape[:2]).astype(np.float32)
Package the inputs to run in the mask predictor.
inputs = {
"image_embeddings": image_embeddings,
"point_coords": coord,
"point_labels": label,
}
Predict a mask and threshold it to get binary mask (0 - no object, 1 - object).
results = ov_predictor(inputs)
masks = results[ov_predictor.output(0)]
masks = postprocess_masks(masks, image.shape[:-1])
masks = masks > 0.0
plt.figure(figsize=(10,10))
plt.imshow(image)
show_mask(masks, plt.gca())
show_points(input_point, input_label, plt.gca())
plt.axis('off')
plt.show()

Example with multiple points¶
in this example, we provide additional point for cover larger object area.
input_point = np.array([[500, 375], [1125, 625], [575, 750], [1405, 575]])
input_label = np.array([1, 1, 1, 1])
Now, prompt for model looks like represented on this image:
plt.figure(figsize=(10,10))
plt.imshow(image)
show_points(input_point, input_label, plt.gca())
plt.axis('off')
plt.show()

Transform the points as in the previous example.
coord = np.concatenate([input_point, np.array([[0.0, 0.0]])], axis=0)[None, :, :]
label = np.concatenate([input_label, np.array([-1])], axis=0)[None, :].astype(np.float32)
coord = resizer.apply_coords(coord, image.shape[:2]).astype(np.float32)
Package inputs, then predict and threshold the mask.
inputs = {
"image_embeddings": image_embeddings,
"point_coords": coord,
"point_labels": label,
}
results = ov_predictor(inputs)
masks = results[ov_predictor.output(0)]
masks = postprocess_masks(masks, image.shape[:-1])
masks = masks > 0.0
plt.figure(figsize=(10,10))
plt.imshow(image)
show_mask(masks, plt.gca())
show_points(input_point, input_label, plt.gca())
plt.axis('off')
plt.show()
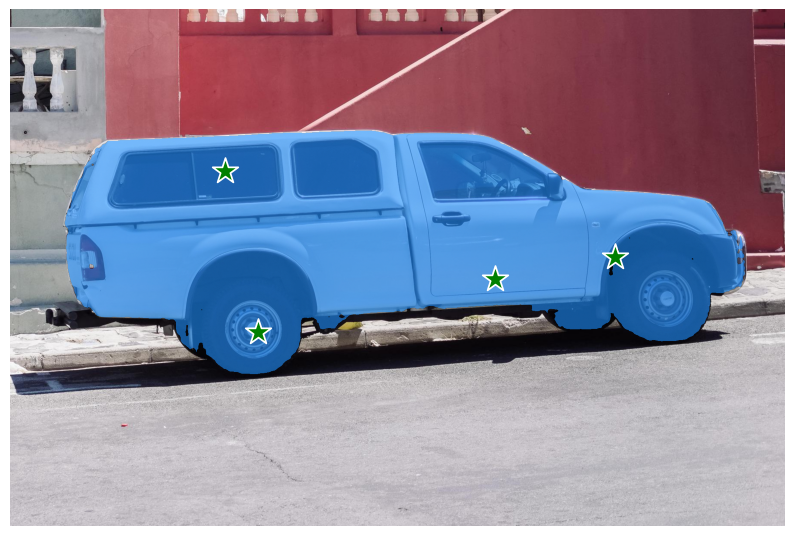
Great! Looks like now, predicted mask cover whole truck.
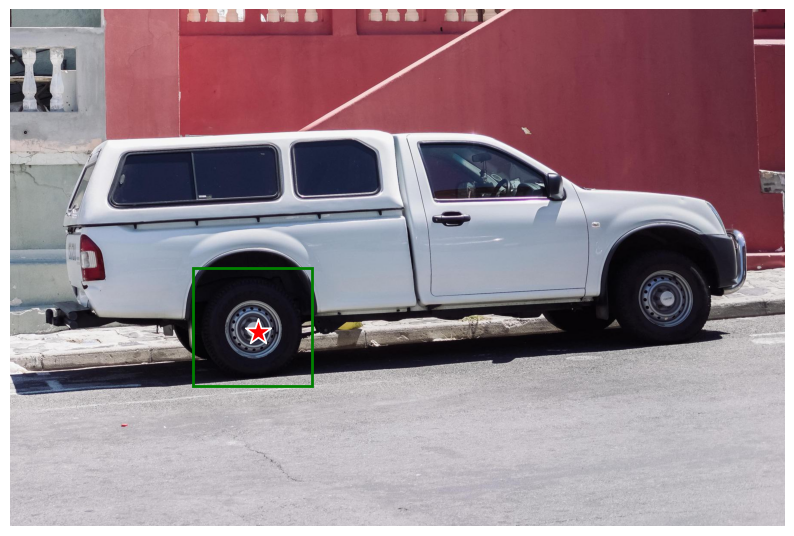
Example box and point input with negative label¶
In this example we define input prompt using bounding box and point inside it.The bounding box represented as set of points of its left upper corner and right lower corner. Label 0 for point speak that this point should be excluded from mask.
input_box = np.array([425, 600, 700, 875])
input_point = np.array([[575, 750]])
input_label = np.array([0])
plt.figure(figsize=(10, 10))
plt.imshow(image)
show_box(input_box, plt.gca())
show_points(input_point, input_label, plt.gca())
plt.axis('off')
plt.show()
Add a batch index, concatenate a box and point inputs, add the appropriate labels for the box corners, and transform. There is no padding point since the input includes a box input.
box_coords = input_box.reshape(2, 2)
box_labels = np.array([2,3])
coord = np.concatenate([input_point, box_coords], axis=0)[None, :, :]
label = np.concatenate([input_label, box_labels], axis=0)[None, :].astype(np.float32)
coord = resizer.apply_coords(coord, image.shape[:2]).astype(np.float32)
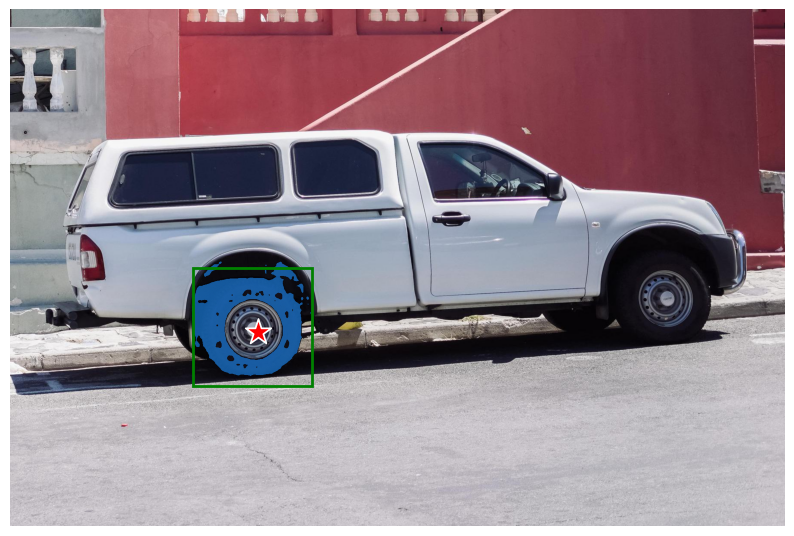
Package inputs, then predict and threshold the mask.
inputs = {
"image_embeddings": image_embeddings,
"point_coords": coord,
"point_labels": label,
}
results = ov_predictor(inputs)
masks = results[ov_predictor.output(0)]
masks = postprocess_masks(masks, image.shape[:-1])
masks = masks > 0.0
plt.figure(figsize=(10, 10))
plt.imshow(image)
show_mask(masks[0], plt.gca())
show_box(input_box, plt.gca())
show_points(input_point, input_label, plt.gca())
plt.axis('off')
plt.show()
Interactive segmentation¶
Now, you can try SAM on own image. Upload image to input window and click on desired point, model predict segment based on your image and point.
import gradio as gr
class Segmenter:
def __init__(self, ov_encoder, ov_predictor):
self.encoder = ov_encoder
self.predictor = ov_predictor
self._img_embeddings = None
def set_image(self, img:np.ndarray):
if self._img_embeddings is not None:
del self._img_embeddings
preprocessed_image = preprocess_image(img)
encoding_results = self.encoder(preprocessed_image)
image_embeddings = encoding_results[ov_encoder.output(0)]
self._img_embeddings = image_embeddings
return img
def get_mask(self, points, img):
coord = np.array(points)
coord = np.concatenate([coord, np.array([[0,0]])], axis=0)
coord = coord[None, :, :]
label = np.concatenate([np.ones(len(points)), np.array([-1])], axis=0)[None, :].astype(np.float32)
coord = resizer.apply_coords(coord, img.shape[:2]).astype(np.float32)
if self._img_embeddings is None:
self.set_image(img)
inputs = {
"image_embeddings": self._img_embeddings,
"point_coords": coord,
"point_labels": label,
}
results = self.predictor(inputs)
masks = results[ov_predictor.output(0)]
masks = postprocess_masks(masks, img.shape[:-1])
masks = masks > 0.0
mask = masks[0]
mask = np.transpose(mask, (1, 2, 0))
return mask
segmenter = Segmenter(ov_encoder, ov_predictor)
with gr.Blocks() as demo:
with gr.Row():
input_img = gr.Image(label="Input", type="numpy", height=480, width=480)
output_img = gr.Image(label="Selected Segment", type="numpy", height=480, width=480)
def on_image_change(img):
segmenter.set_image(img)
return img
def get_select_coords(img, evt: gr.SelectData):
pixels_in_queue = set()
h, w = img.shape[:2]
pixels_in_queue.add((evt.index[0], evt.index[1]))
out = img.copy()
while len(pixels_in_queue) > 0:
pixels = list(pixels_in_queue)
pixels_in_queue = set()
color = np.random.randint(0, 255, size=(1, 1, 3))
mask = segmenter.get_mask(pixels, img)
mask_image = out.copy()
mask_image[mask.squeeze(-1)] = color
out = cv2.addWeighted(out.astype(np.float32), 0.7, mask_image.astype(np.float32), 0.3, 0.0)
out = out.astype(np.uint8)
return out
input_img.select(get_select_coords, [input_img], output_img)
input_img.upload(on_image_change, [input_img], [input_img])
if __name__ == "__main__":
try:
demo.launch()
except Exception:
demo.launch(share=True)
Running on local URL: http://127.0.0.1:7860 To create a public link, set share=True in launch().
Run OpenVINO model in automatic mask generation mode¶
Since SAM can efficiently process prompts, masks for the entire image
can be generated by sampling a large number of prompts over an image.
automatic_mask_generation function implements this capability. It
works by sampling single-point input prompts in a grid over the image,
from each of which SAM can predict multiple masks. Then, masks are
filtered for quality and deduplicated using non-maximal suppression.
Additional options allow for further improvement of mask quality and
quantity, such as running prediction on multiple crops of the image or
postprocessing masks to remove small disconnected regions and holes.
from segment_anything.utils.amg import (
MaskData,
generate_crop_boxes,
uncrop_boxes_xyxy,
uncrop_masks,
uncrop_points,
calculate_stability_score,
rle_to_mask,
batched_mask_to_box,
mask_to_rle_pytorch,
is_box_near_crop_edge,
batch_iterator,
remove_small_regions,
build_all_layer_point_grids,
box_xyxy_to_xywh,
area_from_rle
)
from torchvision.ops.boxes import batched_nms, box_area
from typing import Tuple, List, Dict, Any
def process_batch(
image_embedding: np.ndarray,
points: np.ndarray,
im_size: Tuple[int, ...],
crop_box: List[int],
orig_size: Tuple[int, ...],
iou_thresh,
mask_threshold,
stability_score_offset,
stability_score_thresh
) -> MaskData:
orig_h, orig_w = orig_size
# Run model on this batch
transformed_points = resizer.apply_coords(points, im_size)
in_points = transformed_points
in_labels = np.ones(in_points.shape[0], dtype=int)
inputs = {
"image_embeddings": image_embedding,
"point_coords": in_points[:, None, :],
"point_labels": in_labels[:, None],
}
res = ov_predictor(inputs)
masks = postprocess_masks(res[ov_predictor.output(0)], orig_size)
masks = torch.from_numpy(masks)
iou_preds = torch.from_numpy(res[ov_predictor.output(1)])
# Serialize predictions and store in MaskData
data = MaskData(
masks=masks.flatten(0, 1),
iou_preds=iou_preds.flatten(0, 1),
points=torch.as_tensor(points.repeat(masks.shape[1], axis=0)),
)
del masks
# Filter by predicted IoU
if iou_thresh > 0.0:
keep_mask = data["iou_preds"] > iou_thresh
data.filter(keep_mask)
# Calculate stability score
data["stability_score"] = calculate_stability_score(
data["masks"], mask_threshold, stability_score_offset
)
if stability_score_thresh > 0.0:
keep_mask = data["stability_score"] >= stability_score_thresh
data.filter(keep_mask)
# Threshold masks and calculate boxes
data["masks"] = data["masks"] > mask_threshold
data["boxes"] = batched_mask_to_box(data["masks"])
# Filter boxes that touch crop boundaries
keep_mask = ~is_box_near_crop_edge(data["boxes"], crop_box, [0, 0, orig_w, orig_h])
if not torch.all(keep_mask):
data.filter(keep_mask)
# Compress to RLE
data["masks"] = uncrop_masks(data["masks"], crop_box, orig_h, orig_w)
data["rles"] = mask_to_rle_pytorch(data["masks"])
del data["masks"]
return data
def process_crop(
image: np.ndarray,
point_grids,
crop_box: List[int],
crop_layer_idx: int,
orig_size: Tuple[int, ...],
box_nms_thresh:float = 0.7,
mask_threshold:float = 0.0,
points_per_batch: int = 64,
pred_iou_thresh: float = 0.88,
stability_score_thresh: float = 0.95,
stability_score_offset: float = 1.0,
) -> MaskData:
# Crop the image and calculate embeddings
x0, y0, x1, y1 = crop_box
cropped_im = image[y0:y1, x0:x1, :]
cropped_im_size = cropped_im.shape[:2]
preprocessed_cropped_im = preprocess_image(cropped_im)
crop_embeddings = ov_encoder(preprocessed_cropped_im)[ov_encoder.output(0)]
# Get points for this crop
points_scale = np.array(cropped_im_size)[None, ::-1]
points_for_image = point_grids[crop_layer_idx] * points_scale
# Generate masks for this crop in batches
data = MaskData()
for (points,) in batch_iterator(points_per_batch, points_for_image):
batch_data = process_batch(crop_embeddings, points, cropped_im_size, crop_box, orig_size, pred_iou_thresh, mask_threshold, stability_score_offset, stability_score_thresh)
data.cat(batch_data)
del batch_data
# Remove duplicates within this crop.
keep_by_nms = batched_nms(
data["boxes"].float(),
data["iou_preds"],
torch.zeros(len(data["boxes"])), # categories
iou_threshold=box_nms_thresh,
)
data.filter(keep_by_nms)
# Return to the original image frame
data["boxes"] = uncrop_boxes_xyxy(data["boxes"], crop_box)
data["points"] = uncrop_points(data["points"], crop_box)
data["crop_boxes"] = torch.tensor([crop_box for _ in range(len(data["rles"]))])
return data
def generate_masks(image: np.ndarray, point_grids, crop_n_layers, crop_overlap_ratio, crop_nms_thresh) -> MaskData:
orig_size = image.shape[:2]
crop_boxes, layer_idxs = generate_crop_boxes(
orig_size, crop_n_layers, crop_overlap_ratio
)
# Iterate over image crops
data = MaskData()
for crop_box, layer_idx in zip(crop_boxes, layer_idxs):
crop_data = process_crop(image, point_grids, crop_box, layer_idx, orig_size)
data.cat(crop_data)
# Remove duplicate masks between crops
if len(crop_boxes) > 1:
# Prefer masks from smaller crops
scores = 1 / box_area(data["crop_boxes"])
scores = scores.to(data["boxes"].device)
keep_by_nms = batched_nms(
data["boxes"].float(),
scores,
torch.zeros(len(data["boxes"])), # categories
iou_threshold=crop_nms_thresh,
)
data.filter(keep_by_nms)
data.to_numpy()
return data
def postprocess_small_regions(mask_data: MaskData, min_area: int, nms_thresh: float) -> MaskData:
"""
Removes small disconnected regions and holes in masks, then reruns
box NMS to remove any new duplicates.
Edits mask_data in place.
Requires open-cv as a dependency.
"""
if len(mask_data["rles"]) == 0:
return mask_data
# Filter small disconnected regions and holes
new_masks = []
scores = []
for rle in mask_data["rles"]:
mask = rle_to_mask(rle)
mask, changed = remove_small_regions(mask, min_area, mode="holes")
unchanged = not changed
mask, changed = remove_small_regions(mask, min_area, mode="islands")
unchanged = unchanged and not changed
new_masks.append(torch.as_tensor(mask).unsqueeze(0))
# Give score=0 to changed masks and score=1 to unchanged masks
# so NMS will prefer ones that didn't need postprocessing
scores.append(float(unchanged))
# Recalculate boxes and remove any new duplicates
masks = torch.cat(new_masks, dim=0)
boxes = batched_mask_to_box(masks)
keep_by_nms = batched_nms(
boxes.float(),
torch.as_tensor(scores),
torch.zeros(len(boxes)), # categories
iou_threshold=nms_thresh,
)
# Only recalculate RLEs for masks that have changed
for i_mask in keep_by_nms:
if scores[i_mask] == 0.0:
mask_torch = masks[i_mask].unsqueeze(0)
mask_data["rles"][i_mask] = mask_to_rle_pytorch(mask_torch)[0]
# update res directly
mask_data["boxes"][i_mask] = boxes[i_mask]
mask_data.filter(keep_by_nms)
return mask_data
There are several tunable parameters in automatic mask generation that control how densely points are sampled and what the thresholds are for removing low quality or duplicate masks. Additionally, generation can be automatically run on crops of the image to get improved performance on smaller objects, and post-processing can remove stray pixels and holes
def automatic_mask_generation(
image: np.ndarray, min_mask_region_area: int = 0, points_per_side: int = 32, crop_n_layers: int = 0, crop_n_points_downscale_factor: int = 1, crop_overlap_ratio: float = 512 / 1500, box_nms_thresh: float = 0.7, crop_nms_thresh: float = 0.7
) -> List[Dict[str, Any]]:
"""
Generates masks for the given image.
Arguments:
image (np.ndarray): The image to generate masks for, in HWC uint8 format.
Returns:
list(dict(str, any)): A list over records for masks. Each record is
a dict containing the following keys:
segmentation (dict(str, any) or np.ndarray): The mask. If
output_mode='binary_mask', is an array of shape HW. Otherwise,
is a dictionary containing the RLE.
bbox (list(float)): The box around the mask, in XYWH format.
area (int): The area in pixels of the mask.
predicted_iou (float): The model's own prediction of the mask's
quality. This is filtered by the pred_iou_thresh parameter.
point_coords (list(list(float))): The point coordinates input
to the model to generate this mask.
stability_score (float): A measure of the mask's quality. This
is filtered on using the stability_score_thresh parameter.
crop_box (list(float)): The crop of the image used to generate
the mask, given in XYWH format.
"""
point_grids = build_all_layer_point_grids(
points_per_side,
crop_n_layers,
crop_n_points_downscale_factor,
)
mask_data = generate_masks(
image, point_grids, crop_n_layers, crop_overlap_ratio, crop_nms_thresh)
# Filter small disconnected regions and holes in masks
if min_mask_region_area > 0:
mask_data = postprocess_small_regions(
mask_data,
min_mask_region_area,
max(box_nms_thresh, crop_nms_thresh),
)
mask_data["segmentations"] = [
rle_to_mask(rle) for rle in mask_data["rles"]]
# Write mask records
curr_anns = []
for idx in range(len(mask_data["segmentations"])):
ann = {
"segmentation": mask_data["segmentations"][idx],
"area": area_from_rle(mask_data["rles"][idx]),
"bbox": box_xyxy_to_xywh(mask_data["boxes"][idx]).tolist(),
"predicted_iou": mask_data["iou_preds"][idx].item(),
"point_coords": [mask_data["points"][idx].tolist()],
"stability_score": mask_data["stability_score"][idx].item(),
"crop_box": box_xyxy_to_xywh(mask_data["crop_boxes"][idx]).tolist(),
}
curr_anns.append(ann)
return curr_anns
prediction = automatic_mask_generation(image)
automatic_mask_generation returns a list over masks, where each mask
is a dictionary containing various data about the mask. These keys are:
segmentation: the maskarea: the area of the mask in pixelsbbox: the boundary box of the mask in XYWH formatpredicted_iou: the model’s own prediction for the quality of the maskpoint_coords: the sampled input point that generated this maskstability_score: an additional measure of mask qualitycrop_box: the crop of the image used to generate this mask in XYWH format
print(f"Number of detected masks: {len(prediction)}")
print(f"Annotation keys: {prediction[0].keys()}")
Number of detected masks: 48
Annotation keys: dict_keys(['segmentation', 'area', 'bbox', 'predicted_iou', 'point_coords', 'stability_score', 'crop_box'])
from tqdm.notebook import tqdm
def draw_anns(image, anns):
if len(anns) == 0:
return
segments_image = image.copy()
sorted_anns = sorted(anns, key=(lambda x: x['area']), reverse=True)
for ann in tqdm(sorted_anns):
mask = ann["segmentation"]
mask_color = np.random.randint(0, 255, size=(1, 1, 3)).astype(np.uint8)
segments_image[mask] = mask_color
return cv2.addWeighted(image.astype(np.float32), 0.7, segments_image.astype(np.float32), 0.3, 0.0)
import PIL
out = draw_anns(image, prediction)
cv2.imwrite("result.png", out[:, :, ::-1])
PIL.Image.open("result.png")
0%| | 0/48 [00:00<?, ?it/s]

Optimize encoder using NNCF Post-training Quantization API¶
NNCF provides a suite of advanced algorithms for Neural Networks inference optimization in OpenVINO with minimal accuracy drop.
Since encoder costing much more time than other parts in SAM inference pipeline, we will use 8-bit quantization in post-training mode (without the fine-tuning pipeline) to optimize encoder of SAM.
The optimization process contains the following steps:
Create a Dataset for quantization.
Run
nncf.quantizefor getting an optimized model.Serialize OpenVINO IR model, using the
openvino.save_modelfunction.
Prepare a calibration dataset¶
Download COCO dataset. Since the dataset is used to calibrate the model’s parameter instead of fine-tuning it, we don’t need to download the label files.
from zipfile import ZipFile
DATA_URL = "https://ultralytics.com/assets/coco128.zip"
OUT_DIR = Path('.')
download_file(DATA_URL, directory=OUT_DIR, show_progress=True)
if not (OUT_DIR / "coco128/images/train2017").exists():
with ZipFile('coco128.zip' , "r") as zip_ref:
zip_ref.extractall(OUT_DIR)
'coco128.zip' already exists.
Create an instance of the nncf.Dataset class that represents the
calibration dataset. For PyTorch, we can pass an instance of the
torch.utils.data.DataLoader object.
import torch.utils.data as data
class COCOLoader(data.Dataset):
def __init__(self, images_path):
self.images = list(Path(images_path).iterdir())
def __getitem__(self, index):
image_path = self.images[index]
image = cv2.imread(str(image_path))
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
return image
def __len__(self):
return len(self.images)
coco_dataset = COCOLoader(OUT_DIR / 'coco128/images/train2017')
calibration_loader = torch.utils.data.DataLoader(coco_dataset)
The transformation function is a function that takes a sample from the dataset and returns data that can be passed to the model for inference.
import nncf
def transform_fn(image_data):
"""
Quantization transform function. Extracts and preprocess input data from dataloader item for quantization.
Parameters:
image_data: image data produced by DataLoader during iteration
Returns:
input_tensor: input data in Dict format for model quantization
"""
image = image_data.numpy()
processed_image = preprocess_image(np.squeeze(image))
return processed_image
calibration_dataset = nncf.Dataset(calibration_loader, transform_fn)
INFO:nncf:NNCF initialized successfully. Supported frameworks detected: torch, tensorflow, onnx, openvino
Run quantization and serialize OpenVINO IR model¶
The nncf.quantize function provides an interface for model
quantization. It requires an instance of the OpenVINO Model and
quantization dataset. It is available for models in the following
frameworks: PyTorch, TensorFlow 2.x, ONNX, and
OpenVINO IR.
Optionally, some additional parameters for the configuration
quantization process (number of samples for quantization, preset, model
type, etc.) can be provided. model_type can be used to specify
quantization scheme required for specific type of the model. For
example, Transformer models such as SAM require a special quantization
scheme to preserve accuracy after quantization. To achieve a better
result, we will use a mixed quantization preset. It provides
symmetric quantization of weights and asymmetric quantization of
activations.
NOTE: Model post-training quantization is time-consuming process. Be patient, it can take several minutes depending on your hardware.
model = core.read_model(ov_encoder_path)
quantized_model = nncf.quantize(model,
calibration_dataset,
model_type=nncf.parameters.ModelType.TRANSFORMER,
preset=nncf.common.quantization.structs.QuantizationPreset.MIXED, subset_size=128)
print("model quantization finished")
2023-09-11 20:39:36.145499: I tensorflow/core/util/port.cc:110] oneDNN custom operations are on. You may see slightly different numerical results due to floating-point round-off errors from different computation orders. To turn them off, set the environment variable TF_ENABLE_ONEDNN_OPTS=0. 2023-09-11 20:39:36.181406: I tensorflow/core/platform/cpu_feature_guard.cc:182] This TensorFlow binary is optimized to use available CPU instructions in performance-critical operations. To enable the following instructions: AVX2 AVX512F AVX512_VNNI FMA, in other operations, rebuild TensorFlow with the appropriate compiler flags. 2023-09-11 20:39:36.769588: W tensorflow/compiler/tf2tensorrt/utils/py_utils.cc:38] TF-TRT Warning: Could not find TensorRT Statistics collection: 100%|██████████████████| 128/128 [02:12<00:00, 1.03s/it] Applying Smooth Quant: 100%|████████████████████| 48/48 [00:01<00:00, 32.29it/s]
INFO:nncf:36 ignored nodes was found by name in the NNCFGraph
Statistics collection: 100%|██████████████████| 128/128 [04:36<00:00, 2.16s/it]
Applying Fast Bias correction: 100%|████████████| 49/49 [00:28<00:00, 1.72it/s]
model quantization finished
ov_encoder_path_int8 = "sam_image_encoder_int8.xml"
ov.save_model(quantized_model, ov_encoder_path_int8)
Validate Quantized Model Inference¶
We can reuse the previous code to validate the output of INT8 model.
# Load INT8 model and run pipeline again
ov_encoder_model_int8 = core.read_model(ov_encoder_path_int8)
ov_encoder_int8 = core.compile_model(ov_encoder_model_int8, device.value)
encoding_results = ov_encoder_int8(preprocessed_image)
image_embeddings = encoding_results[ov_encoder_int8.output(0)]
input_point = np.array([[500, 375]])
input_label = np.array([1])
coord = np.concatenate([input_point, np.array([[0.0, 0.0]])], axis=0)[None, :, :]
label = np.concatenate([input_label, np.array([-1])], axis=0)[None, :].astype(np.float32)
coord = resizer.apply_coords(coord, image.shape[:2]).astype(np.float32)
inputs = {
"image_embeddings": image_embeddings,
"point_coords": coord,
"point_labels": label,
}
results = ov_predictor(inputs)
masks = results[ov_predictor.output(0)]
masks = postprocess_masks(masks, image.shape[:-1])
masks = masks > 0.0
plt.figure(figsize=(10,10))
plt.imshow(image)
show_mask(masks, plt.gca())
show_points(input_point, input_label, plt.gca())
plt.axis('off')
plt.show()

Run INT8 model in automatic mask generation mode
ov_encoder = ov_encoder_int8
prediction = automatic_mask_generation(image)
out = draw_anns(image, prediction)
cv2.imwrite("result_int8.png", out[:, :, ::-1])
PIL.Image.open("result_int8.png")
0%| | 0/47 [00:00<?, ?it/s]

Compare Performance of the Original and Quantized Models¶
Finally, use the OpenVINO
Benchmark
Tool
to measure the inference performance of the FP32 and INT8
models.
# Inference FP32 model (OpenVINO IR)
!benchmark_app -m $ov_encoder_path -d $device.value
[Step 1/11] Parsing and validating input arguments [ INFO ] Parsing input parameters [Step 2/11] Loading OpenVINO Runtime [ WARNING ] Default duration 120 seconds is used for unknown device AUTO [ INFO ] OpenVINO: [ INFO ] Build ................................. 2023.1.0-12050-e33de350633 [ INFO ] [ INFO ] Device info: [ INFO ] AUTO [ INFO ] Build ................................. 2023.1.0-12050-e33de350633 [ INFO ] [ INFO ] [Step 3/11] Setting device configuration [ WARNING ] Performance hint was not explicitly specified in command line. Device(AUTO) performance hint will be set to PerformanceMode.THROUGHPUT. [Step 4/11] Reading model files [ INFO ] Loading model files [ INFO ] Read model took 31.21 ms [ INFO ] Original model I/O parameters: [ INFO ] Model inputs: [ INFO ] x (node: x) : f32 / [...] / [1,3,1024,1024] [ INFO ] Model outputs: [ INFO ] *NO_NAME* (node: __module.neck.3/aten::add/Add_2933) : f32 / [...] / [1,256,64,64] [Step 5/11] Resizing model to match image sizes and given batch [ INFO ] Model batch size: 1 [Step 6/11] Configuring input of the model [ INFO ] Model inputs: [ INFO ] x (node: x) : u8 / [N,C,H,W] / [1,3,1024,1024] [ INFO ] Model outputs: [ INFO ] *NO_NAME* (node: __module.neck.3/aten::add/Add_2933) : f32 / [...] / [1,256,64,64] [Step 7/11] Loading the model to the device [ INFO ] Compile model took 956.62 ms [Step 8/11] Querying optimal runtime parameters [ INFO ] Model: [ INFO ] NETWORK_NAME: Model474 [ INFO ] EXECUTION_DEVICES: ['CPU'] [ INFO ] PERFORMANCE_HINT: PerformanceMode.THROUGHPUT [ INFO ] OPTIMAL_NUMBER_OF_INFER_REQUESTS: 12 [ INFO ] MULTI_DEVICE_PRIORITIES: CPU [ INFO ] CPU: [ INFO ] AFFINITY: Affinity.CORE [ INFO ] CPU_DENORMALS_OPTIMIZATION: False [ INFO ] CPU_SPARSE_WEIGHTS_DECOMPRESSION_RATE: 1.0 [ INFO ] ENABLE_CPU_PINNING: True [ INFO ] ENABLE_HYPER_THREADING: True [ INFO ] EXECUTION_DEVICES: ['CPU'] [ INFO ] EXECUTION_MODE_HINT: ExecutionMode.PERFORMANCE [ INFO ] INFERENCE_NUM_THREADS: 36 [ INFO ] INFERENCE_PRECISION_HINT: <Type: 'float32'> [ INFO ] NETWORK_NAME: Model474 [ INFO ] NUM_STREAMS: 12 [ INFO ] OPTIMAL_NUMBER_OF_INFER_REQUESTS: 12 [ INFO ] PERFORMANCE_HINT: PerformanceMode.THROUGHPUT [ INFO ] PERFORMANCE_HINT_NUM_REQUESTS: 0 [ INFO ] PERF_COUNT: False [ INFO ] SCHEDULING_CORE_TYPE: SchedulingCoreType.ANY_CORE [ INFO ] MODEL_PRIORITY: Priority.MEDIUM [ INFO ] LOADED_FROM_CACHE: False [Step 9/11] Creating infer requests and preparing input tensors [ WARNING ] No input files were given for input 'x'!. This input will be filled with random values! [ INFO ] Fill input 'x' with random values [Step 10/11] Measuring performance (Start inference asynchronously, 12 inference requests, limits: 120000 ms duration) [ INFO ] Benchmarking in inference only mode (inputs filling are not included in measurement loop). [ INFO ] First inference took 3347.39 ms [Step 11/11] Dumping statistics report [ INFO ] Execution Devices:['CPU'] [ INFO ] Count: 132 iterations [ INFO ] Duration: 135907.17 ms [ INFO ] Latency: [ INFO ] Median: 12159.63 ms [ INFO ] Average: 12098.43 ms [ INFO ] Min: 7652.77 ms [ INFO ] Max: 13027.98 ms [ INFO ] Throughput: 0.97 FPS
# Inference INT8 model (OpenVINO IR)
!benchmark_app -m $ov_encoder_path_int8 -d $device.value
[Step 1/11] Parsing and validating input arguments [ INFO ] Parsing input parameters [Step 2/11] Loading OpenVINO Runtime [ WARNING ] Default duration 120 seconds is used for unknown device AUTO [ INFO ] OpenVINO: [ INFO ] Build ................................. 2023.1.0-12050-e33de350633 [ INFO ] [ INFO ] Device info: [ INFO ] AUTO [ INFO ] Build ................................. 2023.1.0-12050-e33de350633 [ INFO ] [ INFO ] [Step 3/11] Setting device configuration [ WARNING ] Performance hint was not explicitly specified in command line. Device(AUTO) performance hint will be set to PerformanceMode.THROUGHPUT. [Step 4/11] Reading model files [ INFO ] Loading model files [ INFO ] Read model took 40.67 ms [ INFO ] Original model I/O parameters: [ INFO ] Model inputs: [ INFO ] x (node: x) : f32 / [...] / [1,3,1024,1024] [ INFO ] Model outputs: [ INFO ] *NO_NAME* (node: __module.neck.3/aten::add/Add_2933) : f32 / [...] / [1,256,64,64] [Step 5/11] Resizing model to match image sizes and given batch [ INFO ] Model batch size: 1 [Step 6/11] Configuring input of the model [ INFO ] Model inputs: [ INFO ] x (node: x) : u8 / [N,C,H,W] / [1,3,1024,1024] [ INFO ] Model outputs: [ INFO ] *NO_NAME* (node: __module.neck.3/aten::add/Add_2933) : f32 / [...] / [1,256,64,64] [Step 7/11] Loading the model to the device [ INFO ] Compile model took 1151.47 ms [Step 8/11] Querying optimal runtime parameters [ INFO ] Model: [ INFO ] NETWORK_NAME: Model474 [ INFO ] EXECUTION_DEVICES: ['CPU'] [ INFO ] PERFORMANCE_HINT: PerformanceMode.THROUGHPUT [ INFO ] OPTIMAL_NUMBER_OF_INFER_REQUESTS: 12 [ INFO ] MULTI_DEVICE_PRIORITIES: CPU [ INFO ] CPU: [ INFO ] AFFINITY: Affinity.CORE [ INFO ] CPU_DENORMALS_OPTIMIZATION: False [ INFO ] CPU_SPARSE_WEIGHTS_DECOMPRESSION_RATE: 1.0 [ INFO ] ENABLE_CPU_PINNING: True [ INFO ] ENABLE_HYPER_THREADING: True [ INFO ] EXECUTION_DEVICES: ['CPU'] [ INFO ] EXECUTION_MODE_HINT: ExecutionMode.PERFORMANCE [ INFO ] INFERENCE_NUM_THREADS: 36 [ INFO ] INFERENCE_PRECISION_HINT: <Type: 'float32'> [ INFO ] NETWORK_NAME: Model474 [ INFO ] NUM_STREAMS: 12 [ INFO ] OPTIMAL_NUMBER_OF_INFER_REQUESTS: 12 [ INFO ] PERFORMANCE_HINT: PerformanceMode.THROUGHPUT [ INFO ] PERFORMANCE_HINT_NUM_REQUESTS: 0 [ INFO ] PERF_COUNT: False [ INFO ] SCHEDULING_CORE_TYPE: SchedulingCoreType.ANY_CORE [ INFO ] MODEL_PRIORITY: Priority.MEDIUM [ INFO ] LOADED_FROM_CACHE: False [Step 9/11] Creating infer requests and preparing input tensors [ WARNING ] No input files were given for input 'x'!. This input will be filled with random values! [ INFO ] Fill input 'x' with random values [Step 10/11] Measuring performance (Start inference asynchronously, 12 inference requests, limits: 120000 ms duration) [ INFO ] Benchmarking in inference only mode (inputs filling are not included in measurement loop). [ INFO ] First inference took 1951.78 ms [Step 11/11] Dumping statistics report [ INFO ] Execution Devices:['CPU'] [ INFO ] Count: 216 iterations [ INFO ] Duration: 130123.96 ms [ INFO ] Latency: [ INFO ] Median: 7192.03 ms [ INFO ] Average: 7197.18 ms [ INFO ] Min: 6134.35 ms [ INFO ] Max: 7888.28 ms [ INFO ] Throughput: 1.66 FPS