Convert and Optimize YOLOv8 real-time object detection with OpenVINO™#
This Jupyter notebook can be launched on-line, opening an interactive environment in a browser window. You can also make a local installation. Choose one of the following options:


Real-time object detection is often used as a key component in computer vision systems. Applications that use real-time object detection models include video analytics, robotics, autonomous vehicles, multi-object tracking and object counting, medical image analysis, and many others.
This tutorial demonstrates step-by-step instructions on how to run and optimize PyTorch YOLOv8 with OpenVINO. We consider the steps required for object detection scenario.
The tutorial consists of the following steps:
Prepare the PyTorch model.
Download and prepare a dataset.
Validate the original model.
Convert the PyTorch model to OpenVINO IR.
Validate the converted model.
Prepare and run optimization pipeline.
Compare performance of the FP32 and quantized models.
Compare accuracy of the FP32 and quantized models.
Other optimization possibilities with OpenVINO api
Live demo
Table of contents:
Installation Instructions#
This is a self-contained example that relies solely on its own code.
We recommend running the notebook in a virtual environment. You only need a Jupyter server to start. For details, please refer to Installation Guide.
Get PyTorch model#
Generally, PyTorch models represent an instance of the
torch.nn.Module
class, initialized by a state dictionary with model weights. We will use
the YOLOv8 nano model (also known as yolov8n) pre-trained on a COCO
dataset, which is available in this
repo. Similar steps are
also applicable to other YOLOv8 models. Typical steps to obtain a
pre-trained model: 1. Create an instance of a model class. 2. Load a
checkpoint state dict, which contains the pre-trained model weights. 3.
Turn the model to evaluation for switching some operations to inference
mode.
In this case, the creators of the model provide an API that enables converting the YOLOv8 model to ONNX and then to OpenVINO IR. Therefore, we do not need to do these steps manually.
Prerequisites#
Install necessary packages.
%pip install -q "openvino>=2024.0.0" "nncf>=2.9.0"
%pip install -q "torch>=2.1" "torchvision>=0.16" "ultralytics==8.3.59" onnx tqdm opencv-python --extra-index-url https://download.pytorch.org/whl/cpu
Import required utility functions. The lower cell will download the
notebook_utils Python module from GitHub.
from pathlib import Path
# Fetch `notebook_utils` module
import requests
if not Path("notebook_utils.py").exists():
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/notebook_utils.py",
)
open("notebook_utils.py", "w").write(r.text)
from notebook_utils import download_file, VideoPlayer, device_widget, quantization_widget
# Read more about telemetry collection at https://github.com/openvinotoolkit/openvino_notebooks?tab=readme-ov-file#-telemetry
from notebook_utils import collect_telemetry
collect_telemetry("yolov8-object-detection.ipynb")
# Download a test sample
IMAGE_PATH = Path("./data/coco_bike.jpg")
if not IMAGE_PATH.exists():
download_file(
url="https://storage.openvinotoolkit.org/repositories/openvino_notebooks/data/data/image/coco_bike.jpg",
filename=IMAGE_PATH.name,
directory=IMAGE_PATH.parent,
)
'data/coco_bike.jpg' already exists.
PosixPath('/home/akash/intel/openvino_notebooks/notebooks/yolov8-optimization/data/coco_bike.jpg')
Instantiate model#
There are several models available in the original repository, targeted for different tasks. For loading the model, required to specify a path to the model checkpoint. It can be some local path or name available on models hub (in this case model checkpoint will be downloaded automatically).
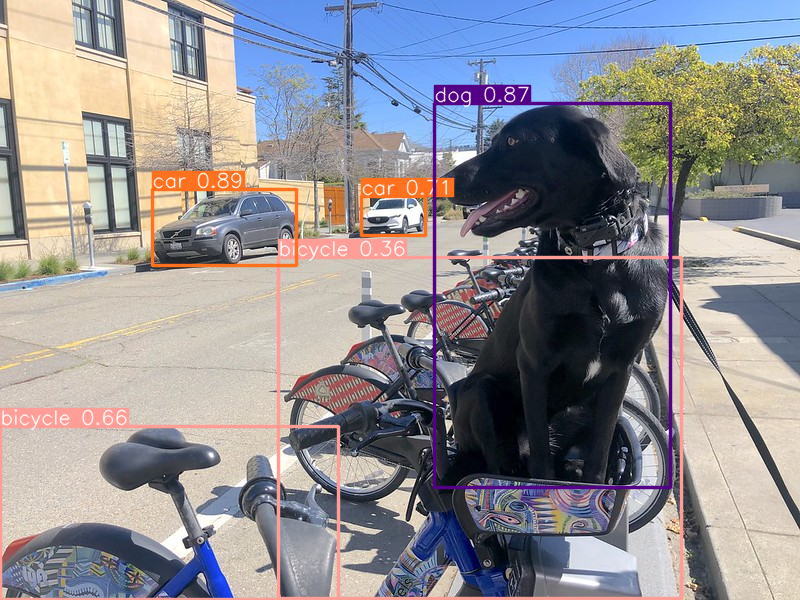
Making prediction, the model accepts a path to input image and returns
list with Results class object. Results contains boxes for object
detection model. Also it contains utilities for processing results, for
example, plot() method for drawing.
Let us consider the examples:
models_dir = Path("./models")
models_dir.mkdir(exist_ok=True)
from PIL import Image
from ultralytics import YOLO
DET_MODEL_NAME = "yolov8n"
det_model = YOLO(models_dir / f"{DET_MODEL_NAME}.pt")
label_map = det_model.model.names
res = det_model(IMAGE_PATH)
Image.fromarray(res[0].plot()[:, :, ::-1])
Downloading ultralytics/assets to 'models/yolov8n.pt'...
100%|██████████████████████████████████████████████████████████████████████████████████████████████████████| 6.25M/6.25M [00:02<00:00, 2.29MB/s]
image 1/1 /home/akash/intel/openvino_notebooks/notebooks/yolov8-optimization/data/coco_bike.jpg: 480x640 2 bicycles, 2 cars, 1 dog, 82.9ms
Speed: 2.4ms preprocess, 82.9ms inference, 475.6ms postprocess per image at shape (1, 3, 480, 640)
Convert model to OpenVINO IR#
YOLOv8 provides API for convenient model exporting to different formats
including OpenVINO IR. model.export is responsible for model
conversion. We need to specify the format, and additionally, we can
preserve dynamic shapes in the model.
# object detection model
det_model_path = models_dir / f"{DET_MODEL_NAME}_openvino_model/{DET_MODEL_NAME}.xml"
if not det_model_path.exists():
det_model.export(format="openvino", dynamic=True, half=True)
Ultralytics YOLOv8.2.24 🚀 Python-3.8.10 torch-2.1.0+cu121 CPU (Intel Core(TM) i9-10980XE 3.00GHz)
PyTorch: starting from 'models/yolov8n.pt' with input shape (1, 3, 640, 640) BCHW and output shape(s) (1, 84, 8400) (6.2 MB)
OpenVINO: starting export with openvino 2024.3.0-16041-1e3b88e4e3f-releases/2024/3...
OpenVINO: export success ✅ 1.7s, saved as 'models/yolov8n_openvino_model/' (6.4 MB)
Export complete (3.1s)
Results saved to /home/akash/intel/openvino_notebooks/notebooks/yolov8-optimization/models
Predict: yolo predict task=detect model=models/yolov8n_openvino_model imgsz=640 half
Validate: yolo val task=detect model=models/yolov8n_openvino_model imgsz=640 data=coco.yaml half
Visualize: https://netron.app
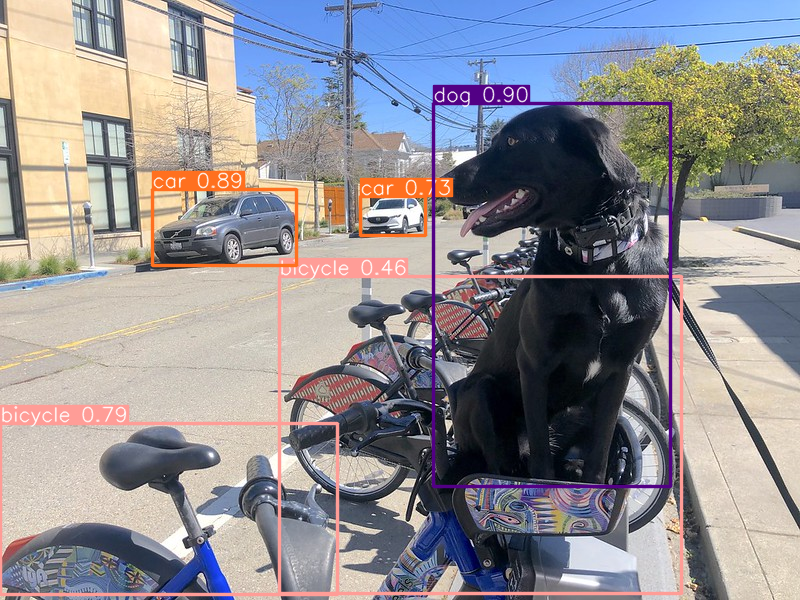
Verify model inference#
We can reuse the base model pipeline for pre- and postprocessing just replacing the inference method where we will use the IR model for inference.
Select inference device#
Select device from dropdown list for running inference using OpenVINO
device = device_widget()
device
Dropdown(description='Device:', index=1, options=('CPU', 'AUTO'), value='AUTO')
Test on single image#
Now, once we have defined preprocessing and postprocessing steps, we are ready to check model prediction for object detection.
import torch
import openvino as ov
core = ov.Core()
det_ov_model = core.read_model(det_model_path)
ov_config = {}
if device.value != "CPU":
det_ov_model.reshape({0: [1, 3, 640, 640]})
if "GPU" in device.value or ("AUTO" in device.value and "GPU" in core.available_devices):
ov_config = {"GPU_DISABLE_WINOGRAD_CONVOLUTION": "YES"}
det_compiled_model = core.compile_model(det_ov_model, device.value, ov_config)
def infer(*args):
result = det_compiled_model(args)
return torch.from_numpy(result[0])
det_model.predictor.inference = infer
det_model.predictor.model.pt = False
res = det_model(IMAGE_PATH)
Image.fromarray(res[0].plot()[:, :, ::-1])
image 1/1 /home/akash/intel/openvino_notebooks/notebooks/yolov8-optimization/data/coco_bike.jpg: 640x640 2 bicycles, 2 cars, 1 dog, 16.1ms
Speed: 3.4ms preprocess, 16.1ms inference, 1.8ms postprocess per image at shape (1, 3, 640, 640)
Check model accuracy on the dataset#
For comparing the optimized model result with the original, it is good to know some measurable results in terms of model accuracy on the validation dataset.
Download the validation dataset#
YOLOv8 is pre-trained on the COCO dataset, so to evaluate the model accuracy we need to download it. According to the instructions provided in the YOLOv8 repo, we also need to download annotations in the format used by the author of the model, for use with the original model evaluation function.
Note: The initial dataset download may take a few minutes to complete. The download speed will vary depending on the quality of your internet connection.
from zipfile import ZipFile
from ultralytics.data.utils import DATASETS_DIR
DATA_URL = "http://images.cocodataset.org/zips/val2017.zip"
LABELS_URL = "https://github.com/ultralytics/yolov5/releases/download/v1.0/coco2017labels-segments.zip"
CFG_URL = "https://raw.githubusercontent.com/ultralytics/ultralytics/v8.1.0/ultralytics/cfg/datasets/coco.yaml"
OUT_DIR = DATASETS_DIR
DATA_PATH = OUT_DIR / "val2017.zip"
LABELS_PATH = OUT_DIR / "coco2017labels-segments.zip"
CFG_PATH = OUT_DIR / "coco.yaml"
if not (OUT_DIR / "coco/labels").exists():
download_file(DATA_URL, DATA_PATH.name, DATA_PATH.parent)
download_file(LABELS_URL, LABELS_PATH.name, LABELS_PATH.parent)
download_file(CFG_URL, CFG_PATH.name, CFG_PATH.parent)
with ZipFile(LABELS_PATH, "r") as zip_ref:
zip_ref.extractall(OUT_DIR)
with ZipFile(DATA_PATH, "r") as zip_ref:
zip_ref.extractall(OUT_DIR / "coco/images")
/home/akash/intel/NNCF/nncf/examples/post_training_quantization/openvino/yolov8/datasets/val2017.zip: 0%| …
IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs) IOPub message rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to avoid crashing it. To change this limit, set the config variable --ServerApp.iopub_msg_rate_limit. Current values: ServerApp.iopub_msg_rate_limit=1000.0 (msgs/sec) ServerApp.rate_limit_window=3.0 (secs)
'/home/akash/intel/NNCF/nncf/examples/post_training_quantization/openvino/yolov8/datasets/coco2017labels-segments.zip' already exists.
/home/akash/intel/NNCF/nncf/examples/post_training_quantization/openvino/yolov8/datasets/coco.yaml: 0%| …
Define validation function#
import numpy as np
from tqdm.notebook import tqdm
from ultralytics.utils.metrics import ConfusionMatrix
def test(
model: ov.Model,
core: ov.Core,
data_loader: torch.utils.data.DataLoader,
validator,
num_samples: int = None,
):
"""
OpenVINO YOLOv8 model accuracy validation function. Runs model validation on dataset and returns metrics
Parameters:
model (Model): OpenVINO model
data_loader (torch.utils.data.DataLoader): dataset loader
validator: instance of validator class
num_samples (int, *optional*, None): validate model only on specified number samples, if provided
Returns:
stats: (Dict[str, float]) - dictionary with aggregated accuracy metrics statistics, key is metric name, value is metric value
"""
validator.seen = 0
validator.jdict = []
validator.stats = dict(tp=[], conf=[], pred_cls=[], target_cls=[], target_img=[])
validator.batch_i = 1
validator.confusion_matrix = ConfusionMatrix(nc=validator.nc)
model.reshape({0: [1, 3, -1, -1]})
compiled_model = core.compile_model(model)
for batch_i, batch in enumerate(tqdm(data_loader, total=num_samples)):
if num_samples is not None and batch_i == num_samples:
break
batch = validator.preprocess(batch)
results = compiled_model(batch["img"])
preds = torch.from_numpy(results[compiled_model.output(0)])
preds = validator.postprocess(preds)
validator.update_metrics(preds, batch)
stats = validator.get_stats()
return stats
def print_stats(stats: np.ndarray, total_images: int, total_objects: int):
"""
Helper function for printing accuracy statistic
Parameters:
stats: (Dict[str, float]) - dictionary with aggregated accuracy metrics statistics, key is metric name, value is metric value
total_images (int) - number of evaluated images
total objects (int)
Returns:
None
"""
print("Boxes:")
mp, mr, map50, mean_ap = (
stats["metrics/precision(B)"],
stats["metrics/recall(B)"],
stats["metrics/mAP50(B)"],
stats["metrics/mAP50-95(B)"],
)
# Print results
print(" Best mean average:")
s = ("%20s" + "%12s" * 6) % (
"Class",
"Images",
"Labels",
"Precision",
"Recall",
"mAP@.5",
"mAP@.5:.95",
)
print(s)
pf = "%20s" + "%12i" * 2 + "%12.3g" * 4 # print format
print(pf % ("all", total_images, total_objects, mp, mr, map50, mean_ap))
if "metrics/precision(M)" in stats:
s_mp, s_mr, s_map50, s_mean_ap = (
stats["metrics/precision(M)"],
stats["metrics/recall(M)"],
stats["metrics/mAP50(M)"],
stats["metrics/mAP50-95(M)"],
)
# Print results
print(" Macro average mean:")
s = ("%20s" + "%12s" * 6) % (
"Class",
"Images",
"Labels",
"Precision",
"Recall",
"mAP@.5",
"mAP@.5:.95",
)
print(s)
pf = "%20s" + "%12i" * 2 + "%12.3g" * 4 # print format
print(pf % ("all", total_images, total_objects, s_mp, s_mr, s_map50, s_mean_ap))
Configure Validator helper and create DataLoader#
The original model repository uses a Validator wrapper, which
represents the accuracy validation pipeline. It creates dataloader and
evaluation metrics and updates metrics on each data batch produced by
the dataloader. Besides that, it is responsible for data preprocessing
and results postprocessing. For class initialization, the configuration
should be provided. We will use the default setup, but it can be
replaced with some parameters overriding to test on custom data. The
model has connected the ValidatorClass method, which creates a
validator class instance.
from ultralytics.utils import DEFAULT_CFG
from ultralytics.cfg import get_cfg
from ultralytics.data.converter import coco80_to_coco91_class
from ultralytics.data.utils import check_det_dataset
args = get_cfg(cfg=DEFAULT_CFG)
args.data = str(CFG_PATH)
det_validator = det_model.task_map[det_model.task]["validator"](args=args)
det_validator.data = check_det_dataset(args.data)
det_validator.stride = 32
det_data_loader = det_validator.get_dataloader(OUT_DIR / "coco", 1)
val: Scanning /home/akash/intel/NNCF/nncf/examples/post_training_quantization/openvino/yolov8/datasets/coco/labels/val2017.cache... 4952 images,
det_validator.is_coco = True
det_validator.class_map = coco80_to_coco91_class()
det_validator.names = det_model.model.names
det_validator.metrics.names = det_validator.names
det_validator.nc = det_model.model.model[-1].nc
After definition test function and validator creation, we are ready for
getting accuracy metrics >Note: Model evaluation is time consuming
process and can take several minutes, depending on the hardware. For
reducing calculation time, we define num_samples parameter with
evaluation subset size, but in this case, accuracy can be noncomparable
with originally reported by the authors of the model, due to validation
subset difference. To validate the models on the full dataset set
``NUM_TEST_SAMPLES = None``.
NUM_TEST_SAMPLES = 300
fp_det_stats = test(det_ov_model, core, det_data_loader, det_validator, num_samples=NUM_TEST_SAMPLES)
0%| | 0/300 [00:00<?, ?it/s]
print_stats(fp_det_stats, det_validator.seen, det_validator.nt_per_class.sum())
Boxes:
Best mean average:
Class Images Labels Precision Recall mAP@.5 mAP@.5:.95
all 300 2145 0.594 0.542 0.579 0.417
print_stats reports the following list of accuracy metrics:
Precisionis the degree of exactness of the model in identifying only relevant objects.Recallmeasures the ability of the model to detect all ground truths objects.mAP@t- mean average precision, represented as area under the Precision-Recall curve aggregated over all classes in the dataset, wheretis the Intersection Over Union (IOU) threshold, degree of overlapping between ground truth and predicted objects. Therefore,mAP@.5indicates that mean average precision is calculated at 0.5 IOU threshold,mAP@.5:.95- is calculated on range IOU thresholds from 0.5 to 0.95 with step 0.05.
Optimize model using NNCF Post-training Quantization API#
NNCF provides a suite of advanced algorithms for Neural Networks inference optimization in OpenVINO with minimal accuracy drop. We will use 8-bit quantization in post-training mode (without the fine-tuning pipeline) to optimize YOLOv8.
The optimization process contains the following steps:
Create a Dataset for quantization.
Run
nncf.quantizefor getting an optimized model.Serialize OpenVINO IR model, using the
openvino.runtime.serializefunction.
Please select below whether you would like to run quantization to improve model inference speed.
int8_model_det_path = models_dir / f"{DET_MODEL_NAME}_openvino_int8_model/{DET_MODEL_NAME}.xml"
quantized_det_model = None
to_quantize = quantization_widget()
to_quantize
Checkbox(value=True, description='Quantization')
Let’s load skip magic extension to skip quantization if
to_quantize is not selected
# Fetch skip_kernel_extension module
if not Path("skip_kernel_extension.py").exists():
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/skip_kernel_extension.py",
)
open("skip_kernel_extension.py", "w").write(r.text)
%load_ext skip_kernel_extension
Reuse validation dataloader in accuracy testing for quantization. For
that, it should be wrapped into the nncf.Dataset object and define a
transformation function for getting only input tensors.
%%skip not $to_quantize.value
import nncf
from typing import Dict
def transform_fn(data_item:Dict):
"""
Quantization transform function. Extracts and preprocess input data from dataloader item for quantization.
Parameters:
data_item: Dict with data item produced by DataLoader during iteration
Returns:
input_tensor: Input data for quantization
"""
input_tensor = det_validator.preprocess(data_item)['img'].numpy()
return input_tensor
quantization_dataset = nncf.Dataset(det_data_loader, transform_fn)
INFO:nncf:NNCF initialized successfully. Supported frameworks detected: torch, onnx, openvino
The nncf.quantize function provides an interface for model
quantization. It requires an instance of the OpenVINO Model and
quantization dataset. Optionally, some additional parameters for the
configuration quantization process (number of samples for quantization,
preset, ignored scope, etc.) can be provided. YOLOv8 model contains
non-ReLU activation functions, which require asymmetric quantization of
activations. To achieve a better result, we will use a mixed
quantization preset. It provides symmetric quantization of weights and
asymmetric quantization of activations. For more accurate results, we
should keep the operation in the postprocessing subgraph in floating
point precision, using the ignored_scope parameter.
Note: Model post-training quantization is time-consuming process. Be patient, it can take several minutes depending on your hardware.
%%skip not $to_quantize.value
ignored_scope = nncf.IgnoredScope( # post-processing
subgraphs=[
nncf.Subgraph(inputs=['__module.model.22/aten::cat/Concat',
'__module.model.22/aten::cat/Concat_1',
'__module.model.22/aten::cat/Concat_2'],
outputs=['__module.model.22/aten::cat/Concat_7'])
]
)
# Detection model
quantized_det_model = nncf.quantize(
det_ov_model,
quantization_dataset,
preset=nncf.QuantizationPreset.MIXED,
ignored_scope=ignored_scope
)
INFO:nncf:105 ignored nodes were found by subgraphs in the NNCFGraph
INFO:nncf:Not adding activation input quantizer for operation: 126 __module.model.22/aten::cat/Concat
INFO:nncf:Not adding activation input quantizer for operation: 133 __module.model.22/aten::view/Reshape_3
INFO:nncf:Not adding activation input quantizer for operation: 240 __module.model.22/aten::cat/Concat_1
INFO:nncf:Not adding activation input quantizer for operation: 250 __module.model.22/aten::view/Reshape_4
INFO:nncf:Not adding activation input quantizer for operation: 297 __module.model.22/aten::cat/Concat_2
INFO:nncf:Not adding activation input quantizer for operation: 299 __module.model.22/aten::view/Reshape_5
INFO:nncf:Not adding activation input quantizer for operation: 143 __module.model.22/aten::cat/Concat_4
INFO:nncf:Not adding activation input quantizer for operation: 154 __module.model.22/prim::ListUnpack
INFO:nncf:Not adding activation input quantizer for operation: 166 __module.model.22.dfl/aten::view/Reshape
INFO:nncf:Not adding activation input quantizer for operation: 167 __module.model.22/aten::sigmoid/Sigmoid
INFO:nncf:Not adding activation input quantizer for operation: 180 __module.model.22.dfl/aten::transpose/Transpose
INFO:nncf:Not adding activation input quantizer for operation: 191 __module.model.22.dfl/aten::softmax/Softmax
INFO:nncf:Not adding activation input quantizer for operation: 201 __module.model.22.dfl.conv/aten::_convolution/Convolution
INFO:nncf:Not adding activation input quantizer for operation: 208 __module.model.22.dfl/aten::view/Reshape_1
INFO:nncf:Not adding activation input quantizer for operation: 217 __module.model.22/prim::ListUnpack/VariadicSplit
INFO:nncf:Not adding activation input quantizer for operation: 225 __module.model.22/aten::sub/Subtract
INFO:nncf:Not adding activation input quantizer for operation: 226 __module.model.22/aten::add/Add_6
INFO:nncf:Not adding activation input quantizer for operation: 235 __module.model.22/aten::add/Add_7
244 __module.model.22/aten::div/Divide
INFO:nncf:Not adding activation input quantizer for operation: 236 __module.model.22/aten::sub/Subtract_1
INFO:nncf:Not adding activation input quantizer for operation: 245 __module.model.22/aten::cat/Concat_5
INFO:nncf:Not adding activation input quantizer for operation: 214 __module.model.22/aten::mul/Multiply_3
INFO:nncf:Not adding activation input quantizer for operation: 181 __module.model.22/aten::cat/Concat_7
Output()
Output()
%%skip not $to_quantize.value
print(f"Quantized detection model will be saved to {int8_model_det_path}")
ov.save_model(quantized_det_model, str(int8_model_det_path))
Quantized detection model will be saved to models/yolov8n_openvino_int8_model/yolov8n.xml
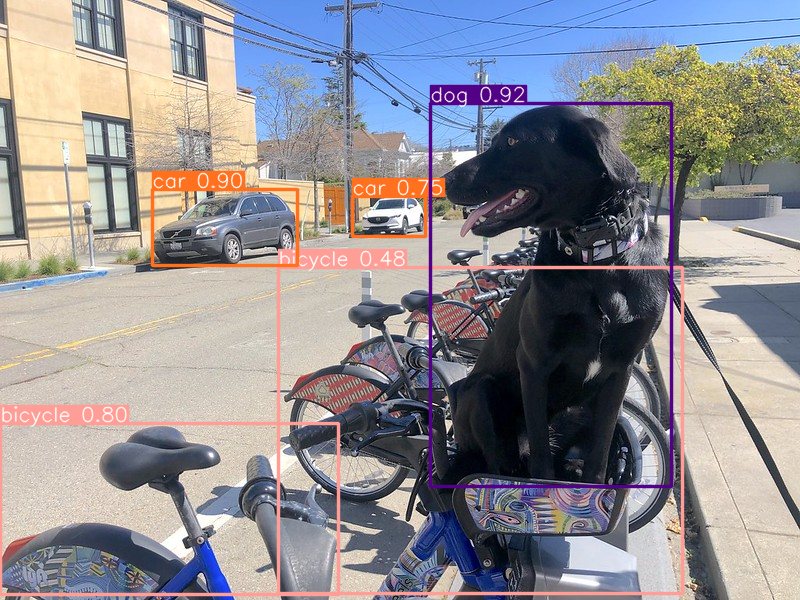
Validate Quantized model inference#
nncf.quantize returns the OpenVINO Model class instance, which is
suitable for loading on a device for making predictions. INT8 model
input data and output result formats have no difference from the
floating point model representation. Therefore, we can reuse the same
detect function defined above for getting the INT8 model result
on the image.
%%skip not $to_quantize.value
device
%%skip not $to_quantize.value
ov_config = {}
if device.value != "CPU":
quantized_det_model.reshape({0: [1, 3, 640, 640]})
if "GPU" in device.value or ("AUTO" in device.value and "GPU" in core.available_devices):
ov_config = {"GPU_DISABLE_WINOGRAD_CONVOLUTION": "YES"}
quantized_det_compiled_model = core.compile_model(quantized_det_model, device.value, ov_config)
def infer(*args):
result = quantized_det_compiled_model(args)
return torch.from_numpy(result[0])
det_model.predictor.inference = infer
res = det_model(IMAGE_PATH)
display(Image.fromarray(res[0].plot()[:, :, ::-1]))
image 1/1 /home/akash/intel/openvino_notebooks/notebooks/yolov8-optimization/data/coco_bike.jpg: 640x640 2 bicycles, 2 cars, 1 dog, 10.9ms
Speed: 3.7ms preprocess, 10.9ms inference, 1.9ms postprocess per image at shape (1, 3, 640, 640)
Compare the Original and Quantized Models#
Compare performance object detection models#
Finally, use the OpenVINO Benchmark
Tool
to measure the inference performance of the FP32 and INT8
models.
Note: For more accurate performance, it is recommended to run
benchmark_appin a terminal/command prompt after closing other applications. Runbenchmark_app -m <model_path> -d CPU -shape "<input_shape>"to benchmark async inference on CPU on specific input data shape for one minute. ChangeCPUtoGPUto benchmark on GPU. Runbenchmark_app --helpto see an overview of all command-line options.
%%skip not $to_quantize.value
device
if int8_model_det_path.exists():
# Inference FP32 model (OpenVINO IR)
!benchmark_app -m $det_model_path -d $device.value -api async -shape "[1,3,640,640]"
[Step 1/11] Parsing and validating input arguments [ INFO ] Parsing input parameters [Step 2/11] Loading OpenVINO Runtime [ WARNING ] Default duration 120 seconds is used for unknown device AUTO [ INFO ] OpenVINO: [ INFO ] Build ................................. 2024.3.0-16041-1e3b88e4e3f-releases/2024/3 [ INFO ] [ INFO ] Device info: [ INFO ] AUTO [ INFO ] Build ................................. 2024.3.0-16041-1e3b88e4e3f-releases/2024/3 [ INFO ] [ INFO ] [Step 3/11] Setting device configuration [ WARNING ] Performance hint was not explicitly specified in command line. Device(AUTO) performance hint will be set to PerformanceMode.THROUGHPUT. [Step 4/11] Reading model files [ INFO ] Loading model files [ INFO ] Read model took 13.54 ms [ INFO ] Original model I/O parameters: [ INFO ] Model inputs: [ INFO ] x (node: x) : f32 / [...] / [?,3,?,?] [ INFO ] Model outputs: [ INFO ] *NO_NAME* (node: __module.model.22/aten::cat/Concat_7) : f32 / [...] / [?,84,21..] [Step 5/11] Resizing model to match image sizes and given batch [ INFO ] Model batch size: 1 [ INFO ] Reshaping model: 'x': [1,3,640,640] [ INFO ] Reshape model took 7.16 ms [Step 6/11] Configuring input of the model [ INFO ] Model inputs: [ INFO ] x (node: x) : u8 / [N,C,H,W] / [1,3,640,640] [ INFO ] Model outputs: [ INFO ] *NO_NAME* (node: __module.model.22/aten::cat/Concat_7) : f32 / [...] / [1,84,8400] [Step 7/11] Loading the model to the device [ INFO ] Compile model took 365.94 ms [Step 8/11] Querying optimal runtime parameters [ INFO ] Model: [ INFO ] NETWORK_NAME: Model0 [ INFO ] EXECUTION_DEVICES: ['CPU'] [ INFO ] PERFORMANCE_HINT: PerformanceMode.THROUGHPUT [ INFO ] OPTIMAL_NUMBER_OF_INFER_REQUESTS: 12 [ INFO ] MULTI_DEVICE_PRIORITIES: CPU [ INFO ] CPU: [ INFO ] AFFINITY: Affinity.CORE [ INFO ] CPU_DENORMALS_OPTIMIZATION: False [ INFO ] CPU_SPARSE_WEIGHTS_DECOMPRESSION_RATE: 1.0 [ INFO ] DYNAMIC_QUANTIZATION_GROUP_SIZE: 32 [ INFO ] ENABLE_CPU_PINNING: True [ INFO ] ENABLE_HYPER_THREADING: True [ INFO ] EXECUTION_DEVICES: ['CPU'] [ INFO ] EXECUTION_MODE_HINT: ExecutionMode.PERFORMANCE [ INFO ] INFERENCE_NUM_THREADS: 36 [ INFO ] INFERENCE_PRECISION_HINT: <Type: 'float32'> [ INFO ] KV_CACHE_PRECISION: <Type: 'float16'> [ INFO ] LOG_LEVEL: Level.NO [ INFO ] MODEL_DISTRIBUTION_POLICY: set() [ INFO ] NETWORK_NAME: Model0 [ INFO ] NUM_STREAMS: 12 [ INFO ] OPTIMAL_NUMBER_OF_INFER_REQUESTS: 12 [ INFO ] PERFORMANCE_HINT: THROUGHPUT [ INFO ] PERFORMANCE_HINT_NUM_REQUESTS: 0 [ INFO ] PERF_COUNT: NO [ INFO ] SCHEDULING_CORE_TYPE: SchedulingCoreType.ANY_CORE [ INFO ] MODEL_PRIORITY: Priority.MEDIUM [ INFO ] LOADED_FROM_CACHE: False [ INFO ] PERF_COUNT: False [Step 9/11] Creating infer requests and preparing input tensors [ WARNING ] No input files were given for input 'x'!. This input will be filled with random values! [ INFO ] Fill input 'x' with random values [Step 10/11] Measuring performance (Start inference asynchronously, 12 inference requests, limits: 120000 ms duration) [ INFO ] Benchmarking in inference only mode (inputs filling are not included in measurement loop). [ INFO ] First inference took 40.11 ms [Step 11/11] Dumping statistics report [ INFO ] Execution Devices:['CPU'] [ INFO ] Count: 16968 iterations [ INFO ] Duration: 120039.34 ms [ INFO ] Latency: [ INFO ] Median: 84.56 ms [ INFO ] Average: 84.70 ms [ INFO ] Min: 38.59 ms [ INFO ] Max: 140.59 ms [ INFO ] Throughput: 141.35 FPS
if int8_model_det_path.exists():
# Inference INT8 model (OpenVINO IR)
!benchmark_app -m $int8_model_det_path -d $device.value -api async -shape "[1,3,640,640]" -t 15
[Step 1/11] Parsing and validating input arguments [ INFO ] Parsing input parameters [Step 2/11] Loading OpenVINO Runtime [ INFO ] OpenVINO: [ INFO ] Build ................................. 2024.3.0-16041-1e3b88e4e3f-releases/2024/3 [ INFO ] [ INFO ] Device info: [ INFO ] AUTO [ INFO ] Build ................................. 2024.3.0-16041-1e3b88e4e3f-releases/2024/3 [ INFO ] [ INFO ] [Step 3/11] Setting device configuration [ WARNING ] Performance hint was not explicitly specified in command line. Device(AUTO) performance hint will be set to PerformanceMode.THROUGHPUT. [Step 4/11] Reading model files [ INFO ] Loading model files [ INFO ] Read model took 41.77 ms [ INFO ] Original model I/O parameters: [ INFO ] Model inputs: [ INFO ] x (node: x) : f32 / [...] / [1,3,?,?] [ INFO ] Model outputs: [ INFO ] *NO_NAME* (node: __module.model.22/aten::cat/Concat_7) : f32 / [...] / [1,84,21..] [Step 5/11] Resizing model to match image sizes and given batch [ INFO ] Model batch size: 1 [ INFO ] Reshaping model: 'x': [1,3,640,640] [ INFO ] Reshape model took 14.55 ms [Step 6/11] Configuring input of the model [ INFO ] Model inputs: [ INFO ] x (node: x) : u8 / [N,C,H,W] / [1,3,640,640] [ INFO ] Model outputs: [ INFO ] *NO_NAME* (node: __module.model.22/aten::cat/Concat_7) : f32 / [...] / [1,84,8400] [Step 7/11] Loading the model to the device [ INFO ] Compile model took 535.46 ms [Step 8/11] Querying optimal runtime parameters [ INFO ] Model: [ INFO ] NETWORK_NAME: Model0 [ INFO ] EXECUTION_DEVICES: ['CPU'] [ INFO ] PERFORMANCE_HINT: PerformanceMode.THROUGHPUT [ INFO ] OPTIMAL_NUMBER_OF_INFER_REQUESTS: 18 [ INFO ] MULTI_DEVICE_PRIORITIES: CPU [ INFO ] CPU: [ INFO ] AFFINITY: Affinity.CORE [ INFO ] CPU_DENORMALS_OPTIMIZATION: False [ INFO ] CPU_SPARSE_WEIGHTS_DECOMPRESSION_RATE: 1.0 [ INFO ] DYNAMIC_QUANTIZATION_GROUP_SIZE: 32 [ INFO ] ENABLE_CPU_PINNING: True [ INFO ] ENABLE_HYPER_THREADING: True [ INFO ] EXECUTION_DEVICES: ['CPU'] [ INFO ] EXECUTION_MODE_HINT: ExecutionMode.PERFORMANCE [ INFO ] INFERENCE_NUM_THREADS: 36 [ INFO ] INFERENCE_PRECISION_HINT: <Type: 'float32'> [ INFO ] KV_CACHE_PRECISION: <Type: 'float16'> [ INFO ] LOG_LEVEL: Level.NO [ INFO ] MODEL_DISTRIBUTION_POLICY: set() [ INFO ] NETWORK_NAME: Model0 [ INFO ] NUM_STREAMS: 18 [ INFO ] OPTIMAL_NUMBER_OF_INFER_REQUESTS: 18 [ INFO ] PERFORMANCE_HINT: THROUGHPUT [ INFO ] PERFORMANCE_HINT_NUM_REQUESTS: 0 [ INFO ] PERF_COUNT: NO [ INFO ] SCHEDULING_CORE_TYPE: SchedulingCoreType.ANY_CORE [ INFO ] MODEL_PRIORITY: Priority.MEDIUM [ INFO ] LOADED_FROM_CACHE: False [ INFO ] PERF_COUNT: False [Step 9/11] Creating infer requests and preparing input tensors [ WARNING ] No input files were given for input 'x'!. This input will be filled with random values! [ INFO ] Fill input 'x' with random values [Step 10/11] Measuring performance (Start inference asynchronously, 18 inference requests, limits: 15000 ms duration) [ INFO ] Benchmarking in inference only mode (inputs filling are not included in measurement loop). [ INFO ] First inference took 31.53 ms [Step 11/11] Dumping statistics report [ INFO ] Execution Devices:['CPU'] [ INFO ] Count: 5598 iterations [ INFO ] Duration: 15049.79 ms [ INFO ] Latency: [ INFO ] Median: 47.83 ms [ INFO ] Average: 48.18 ms [ INFO ] Min: 30.12 ms [ INFO ] Max: 75.38 ms [ INFO ] Throughput: 371.97 FPS
Validate quantized model accuracy#
As we can see, there is no significant difference between INT8 and
float model result in a single image test. To understand how
quantization influences model prediction precision, we can compare model
accuracy on a dataset.
%%skip not $to_quantize.value
int8_det_stats = test(quantized_det_model, core, det_data_loader, det_validator, num_samples=NUM_TEST_SAMPLES)
0%| | 0/300 [00:00<?, ?it/s]
%%skip not $to_quantize.value
print("FP32 model accuracy")
print_stats(fp_det_stats, det_validator.seen, det_validator.nt_per_class.sum())
print("INT8 model accuracy")
print_stats(int8_det_stats, det_validator.seen, det_validator.nt_per_class.sum())
FP32 model accuracy
Boxes:
Best mean average:
Class Images Labels Precision Recall mAP@.5 mAP@.5:.95
all 300 2153 0.594 0.542 0.579 0.417
INT8 model accuracy
Boxes:
Best mean average:
Class Images Labels Precision Recall mAP@.5 mAP@.5:.95
all 300 2153 0.626 0.509 0.576 0.423
Great! Looks like accuracy was changed, but not significantly and it meets passing criteria.
Next steps#
This section contains suggestions on how to additionally improve the performance of your application using OpenVINO.
Async inference pipeline#
The key advantage of the Async API is that when a device is busy with inference, the application can perform other tasks in parallel (for example, populating inputs or scheduling other requests) rather than wait for the current inference to complete first. To understand how to perform async inference using openvino, refer to Async API tutorial
Integration preprocessing to model#
Preprocessing API enables making preprocessing a part of the model reducing application code and dependency on additional image processing libraries. The main advantage of Preprocessing API is that preprocessing steps will be integrated into the execution graph and will be performed on a selected device (CPU/GPU etc.) rather than always being executed on CPU as part of an application. This will improve selected device utilization.
For more information, refer to the overview of Preprocessing API.
For example, we can integrate converting input data layout and
normalization defined in image_to_tensor function.
The integration process consists of the following steps: 1. Initialize a PrePostProcessing object. 2. Define the input data format. 3. Describe preprocessing steps. 4. Integrating Steps into a Model.
The openvino.preprocess.PrePostProcessor class enables specifying
preprocessing and postprocessing steps for a model.
from openvino.preprocess import PrePostProcessor
ppp = PrePostProcessor(quantized_det_model if quantized_det_model is not None else det_model)
To address particular input of a model/preprocessor, the
input(input_id) method, where input_id is a positional index or
input tensor name for input in model.inputs, if a model has a single
input, input_id can be omitted. After reading the image from the
disc, it contains U8 pixels in the [0, 255] range and is stored in
the NHWC layout. To perform a preprocessing conversion, we should
provide this to the tensor description.
ppp.input(0).tensor().set_shape([1, 640, 640, 3]).set_element_type(ov.Type.u8).set_layout(ov.Layout("NHWC"))
pass
To perform layout conversion, we also should provide information about layout expected by model
Our preprocessing function contains the following steps: * Convert the
data type from U8 to FP32. * Convert the data layout from
NHWC to NCHW format. * Normalize each pixel by dividing on
scale factor 255.
ppp.input(input_id).preprocess() is used for defining a sequence of
preprocessing steps:
ppp.input(0).preprocess().convert_element_type(ov.Type.f32).convert_layout(ov.Layout("NCHW")).scale([255.0, 255.0, 255.0])
print(ppp)
Input "x":
User's input tensor: [1,640,640,3], [N,H,W,C], u8
Model's expected tensor: [1,3,?,?], [N,C,H,W], f32
Pre-processing steps (3):
convert type (f32): ([1,640,640,3], [N,H,W,C], u8) -> ([1,640,640,3], [N,H,W,C], f32)
convert layout [N,C,H,W]: ([1,640,640,3], [N,H,W,C], f32) -> ([1,3,640,640], [N,C,H,W], f32)
scale (255,255,255): ([1,3,640,640], [N,C,H,W], f32) -> ([1,3,640,640], [N,C,H,W], f32)
Once the preprocessing steps have been finished, the model can be
finally built. Additionally, we can save a completed model to OpenVINO
IR, using openvino.runtime.serialize.
quantized_model_with_preprocess = ppp.build()
with_preprocess_path = (
int8_model_det_path.with_name(f"{DET_MODEL_NAME}_with_preprocess.xml")
if quantized_det_model is not None
else det_model_path.with_name(f"{DET_MODEL_NAME}_with_preprocess.xml")
)
ov.save_model(quantized_model_with_preprocess, str(with_preprocess_path))
The model with integrated preprocessing is ready for loading to a device.
from typing import Tuple, Dict
import cv2
import numpy as np
from ultralytics.utils.plotting import colors
import random
def plot_one_box(
box: np.ndarray,
img: np.ndarray,
color: Tuple[int, int, int] = None,
label: str = None,
line_thickness: int = 5,
):
"""
Helper function for drawing single bounding box on image
Parameters:
x (np.ndarray): bounding box coordinates in format [x1, y1, x2, y2]
img (no.ndarray): input image
color (Tuple[int, int, int], *optional*, None): color in BGR format for drawing box, if not specified will be selected randomly
label (str, *optonal*, None): box label string, if not provided will not be provided as drowing result
line_thickness (int, *optional*, 5): thickness for box drawing lines
"""
# Plots one bounding box on image img
tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
color = color or [random.randint(0, 255) for _ in range(3)]
c1, c2 = (int(box[0]), int(box[1])), (int(box[2]), int(box[3]))
cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
if label:
tf = max(tl - 1, 1) # font thickness
t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
cv2.putText(
img,
label,
(c1[0], c1[1] - 2),
0,
tl / 3,
[225, 255, 255],
thickness=tf,
lineType=cv2.LINE_AA,
)
return img
def draw_results(results: Dict, source_image: np.ndarray, label_map: Dict):
"""
Helper function for drawing bounding boxes on image
Parameters:
image_res (np.ndarray): detection predictions in format [x1, y1, x2, y2, score, label_id]
source_image (np.ndarray): input image for drawing
label_map; (Dict[int, str]): label_id to class name mapping
Returns:
Image with boxes
"""
boxes = results["det"]
for idx, (*xyxy, conf, lbl) in enumerate(boxes):
label = f"{label_map[int(lbl)]} {conf:.2f}"
source_image = plot_one_box(xyxy, source_image, label=label, color=colors(int(lbl)), line_thickness=1)
return source_image
The model output contains detection boxes candidates, it is a tensor with the [-1,84,-1] shape in the B,84,N format, where:
B - batch size N - number of detection boxes For getting the final prediction, we need to apply a non-maximum suppression algorithm and rescale box coordinates to the original image size.
Finally, detection box has the [x, y, h, w, class_no_1, …, class_no_80] format, where:
(x, y) - raw coordinates of box center h, w - raw height and width of the box class_no_1, …, class_no_80 - probability distribution over the classes.
from typing import Tuple
from ultralytics.utils import ops
import torch
import numpy as np
def letterbox(
img: np.ndarray,
new_shape: Tuple[int, int] = (640, 640),
color: Tuple[int, int, int] = (114, 114, 114),
auto: bool = False,
scale_fill: bool = False,
scaleup: bool = False,
stride: int = 32,
):
"""
Resize image and padding for detection. Takes image as input,
resizes image to fit into new shape with saving original aspect ratio and pads it to meet stride-multiple constraints
Parameters:
img (np.ndarray): image for preprocessing
new_shape (Tuple(int, int)): image size after preprocessing in format [height, width]
color (Tuple(int, int, int)): color for filling padded area
auto (bool): use dynamic input size, only padding for stride constrins applied
scale_fill (bool): scale image to fill new_shape
scaleup (bool): allow scale image if it is lower then desired input size, can affect model accuracy
stride (int): input padding stride
Returns:
img (np.ndarray): image after preprocessing
ratio (Tuple(float, float)): hight and width scaling ratio
padding_size (Tuple(int, int)): height and width padding size
"""
# Resize and pad image while meeting stride-multiple constraints
shape = img.shape[:2] # current shape [height, width]
if isinstance(new_shape, int):
new_shape = (new_shape, new_shape)
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
if not scaleup: # only scale down, do not scale up (for better test mAP)
r = min(r, 1.0)
# Compute padding
ratio = r, r # width, height ratios
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
if auto: # minimum rectangle
dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
elif scale_fill: # stretch
dw, dh = 0.0, 0.0
new_unpad = (new_shape[1], new_shape[0])
ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
dw /= 2 # divide padding into 2 sides
dh /= 2
if shape[::-1] != new_unpad: # resize
img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return img, ratio, (dw, dh)
def postprocess(
pred_boxes: np.ndarray,
input_hw: Tuple[int, int],
orig_img: np.ndarray,
min_conf_threshold: float = 0.25,
nms_iou_threshold: float = 0.7,
agnosting_nms: bool = False,
max_detections: int = 300,
):
"""
YOLOv8 model postprocessing function. Applied non maximum supression algorithm to detections and rescale boxes to original image size
Parameters:
pred_boxes (np.ndarray): model output prediction boxes
input_hw (np.ndarray): preprocessed image
orig_image (np.ndarray): image before preprocessing
min_conf_threshold (float, *optional*, 0.25): minimal accepted confidence for object filtering
nms_iou_threshold (float, *optional*, 0.45): minimal overlap score for removing objects duplicates in NMS
agnostic_nms (bool, *optiona*, False): apply class agnostinc NMS approach or not
max_detections (int, *optional*, 300): maximum detections after NMS
Returns:
pred (List[Dict[str, np.ndarray]]): list of dictionary with det - detected boxes in format [x1, y1, x2, y2, score, label]
"""
nms_kwargs = {"agnostic": agnosting_nms, "max_det": max_detections}
preds = ops.non_max_suppression(torch.from_numpy(pred_boxes), min_conf_threshold, nms_iou_threshold, nc=80, **nms_kwargs)
results = []
for i, pred in enumerate(preds):
shape = orig_img[i].shape if isinstance(orig_img, list) else orig_img.shape
if not len(pred):
results.append({"det": [], "segment": []})
continue
pred[:, :4] = ops.scale_boxes(input_hw, pred[:, :4], shape).round()
results.append({"det": pred})
return results
Now, we can skip these preprocessing steps in detect function:
def detect_without_preprocess(image: np.ndarray, model: ov.Model):
"""
OpenVINO YOLOv8 model with integrated preprocessing inference function. Preprocess image, runs model inference and postprocess results using NMS.
Parameters:
image (np.ndarray): input image.
model (Model): OpenVINO compiled model.
Returns:
detections (np.ndarray): detected boxes in format [x1, y1, x2, y2, score, label]
"""
output_layer = model.output(0)
img = letterbox(image)[0]
input_tensor = np.expand_dims(img, 0)
input_hw = img.shape[:2]
result = model(input_tensor)[output_layer]
detections = postprocess(result, input_hw, image)
return detections
compiled_model = core.compile_model(quantized_model_with_preprocess, device.value)
input_image = np.array(Image.open(IMAGE_PATH))
detections = detect_without_preprocess(input_image, compiled_model)[0]
image_with_boxes = draw_results(detections, input_image, label_map)
Image.fromarray(image_with_boxes)

Live demo#
The following code runs model inference on a video:
import collections
import time
from IPython import display
det_ov_model
# Main processing function to run object detection.
def run_object_detection(
source=0,
flip=False,
use_popup=False,
skip_first_frames=0,
model=det_model,
device=device.value,
):
player = None
ov_config = {}
if device != "CPU":
model.reshape({0: [1, 3, 640, 640]})
if "GPU" in device or ("AUTO" in device and "GPU" in core.available_devices):
ov_config = {"GPU_DISABLE_WINOGRAD_CONVOLUTION": "YES"}
compiled_model = core.compile_model(model, device, ov_config)
def infer(*args):
result = compiled_model(args)
return torch.from_numpy(result[0])
det_model.predictor.inference = infer
try:
# Create a video player to play with target fps.
player = VideoPlayer(source=source, flip=flip, fps=30, skip_first_frames=skip_first_frames)
# Start capturing.
player.start()
if use_popup:
title = "Press ESC to Exit"
cv2.namedWindow(winname=title, flags=cv2.WINDOW_GUI_NORMAL | cv2.WINDOW_AUTOSIZE)
processing_times = collections.deque()
while True:
# Grab the frame.
frame = player.next()
if frame is None:
print("Source ended")
break
# If the frame is larger than full HD, reduce size to improve the performance.
scale = 1280 / max(frame.shape)
if scale < 1:
frame = cv2.resize(
src=frame,
dsize=None,
fx=scale,
fy=scale,
interpolation=cv2.INTER_AREA,
)
# Get the results.
input_image = np.array(frame)
start_time = time.time()
detections = det_model(input_image, verbose=False)
stop_time = time.time()
frame = detections[0].plot()
processing_times.append(stop_time - start_time)
# Use processing times from last 200 frames.
if len(processing_times) > 200:
processing_times.popleft()
_, f_width = frame.shape[:2]
# Mean processing time [ms].
processing_time = np.mean(processing_times) * 1000
fps = 1000 / processing_time
cv2.putText(
img=frame,
text=f"Inference time: {processing_time:.1f}ms ({fps:.1f} FPS)",
org=(20, 40),
fontFace=cv2.FONT_HERSHEY_COMPLEX,
fontScale=f_width / 1000,
color=(0, 0, 255),
thickness=1,
lineType=cv2.LINE_AA,
)
# Use this workaround if there is flickering.
if use_popup:
cv2.imshow(winname=title, mat=frame)
key = cv2.waitKey(1)
# escape = 27
if key == 27:
break
else:
# Encode numpy array to jpg.
_, encoded_img = cv2.imencode(ext=".jpg", img=frame, params=[cv2.IMWRITE_JPEG_QUALITY, 100])
# Create an IPython image.
i = display.Image(data=encoded_img)
# Display the image in this notebook.
display.clear_output(wait=True)
display.display(i)
# ctrl-c
except KeyboardInterrupt:
print("Interrupted")
# any different error
except RuntimeError as e:
print(e)
finally:
if player is not None:
# Stop capturing.
player.stop()
if use_popup:
cv2.destroyAllWindows()
Run Live Object Detection#
Use a webcam as the video input. By default, the primary webcam is set
with source=0. If you have multiple webcams, each one will be
assigned a consecutive number starting at 0. Set flip=True when
using a front-facing camera. Some web browsers, especially Mozilla
Firefox, may cause flickering. If you experience flickering,
set use_popup=True.
NOTE: To use this notebook with a webcam, you need to run the notebook on a computer with a webcam. If you run the notebook on a remote server (for example, in Binder or Google Colab service), the webcam will not work. By default, the lower cell will run model inference on a video file. If you want to try live inference on your webcam set
WEBCAM_INFERENCE = True
Run the object detection:
WEBCAM_INFERENCE = False
if WEBCAM_INFERENCE:
VIDEO_SOURCE = 0 # Webcam
else:
VIDEO_URL = "https://storage.openvinotoolkit.org/repositories/openvino_notebooks/data/data/video/people.mp4"
VIDEO_SOURCE = Path("people.mp4")
if not VIDEO_SOURCE.exists():
download_file(VIDEO_URL)
device
Dropdown(description='Device:', index=1, options=('CPU', 'AUTO'), value='AUTO')
run_object_detection(
source=VIDEO_SOURCE,
flip=True,
use_popup=False,
model=det_ov_model,
device=device.value,
)

Source ended