Asynchronous Inference with OpenVINO™#
This Jupyter notebook can be launched on-line, opening an interactive environment in a browser window. You can also make a local installation. Choose one of the following options:



This notebook demonstrates how to use the Async API for asynchronous execution with OpenVINO.
OpenVINO Runtime supports inference in either synchronous or asynchronous mode. The key advantage of the Async API is that when a device is busy with inference, the application can perform other tasks in parallel (for example, populating inputs or scheduling other requests) rather than wait for the current inference to complete first.
Table of contents:
Installation Instructions#
This is a self-contained example that relies solely on its own code.
We recommend running the notebook in a virtual environment. You only need a Jupyter server to start. For details, please refer to Installation Guide.
Imports#
%pip install -q "openvino>=2023.1.0"
%pip install -q opencv-python tqdm "matplotlib>=3.4"
Note: you may need to restart the kernel to use updated packages.
Note: you may need to restart the kernel to use updated packages.
import cv2
import time
import numpy as np
import openvino as ov
from IPython import display
import matplotlib.pyplot as plt
from pathlib import Path
# Fetch the notebook utils script from the openvino_notebooks repo
import requests
if not Path("notebook_utils.py").exists():
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/notebook_utils.py",
)
open("notebook_utils.py", "w").write(r.text)
import notebook_utils as utils
# Read more about telemetry collection at https://github.com/openvinotoolkit/openvino_notebooks?tab=readme-ov-file#-telemetry
from notebook_utils import collect_telemetry
collect_telemetry("async-api.ipynb")
Prepare model and data processing#
Download test model#
We use a pre-trained model from OpenVINO’s Open Model Zoo to start the test. In this case, the model will be executed to detect the person in each frame of the video.
from pathlib import Path
# directory where model will be downloaded
base_model_dir = "model"
# model name as named in Open Model Zoo
model_name = "person-detection-0202"
precision = "FP16"
model_path = Path("model") / f"{model_name}.xml"
base_model_url = "https://storage.openvinotoolkit.org/repositories/open_model_zoo/2023.0/models_bin/1"
if not Path(model_path).exists():
utils.download_file(f"{base_model_url}/{model_name}/{precision}/{model_name}.xml", filename=model_path.name, directory=model_path.parent)
utils.download_file(
f"{base_model_url}/{model_name}/{precision}/{model_name}.bin", filename=model_path.name.replace(".xml", ".bin"), directory=model_path.parent
)
person-detection-0202.xml: 0%| | 0.00/249k [00:00<?, ?B/s]
person-detection-0202.bin: 0%| | 0.00/3.47M [00:00<?, ?B/s]
Select inference device#
device = utils.device_widget(default="CPU")
device
Dropdown(description='Device:', options=('CPU', 'AUTO'), value='CPU')
Load the model#
# initialize OpenVINO runtime
core = ov.Core()
# read the network and corresponding weights from file
model = core.read_model(model=model_path)
# compile the model for the CPU (you can choose manually CPU, GPU etc.)
# or let the engine choose the best available device (AUTO)
compiled_model = core.compile_model(model=model, device_name=device.value)
# get input node
input_layer_ir = model.input(0)
N, C, H, W = input_layer_ir.shape
shape = (H, W)
Create functions for data processing#
def preprocess(image):
"""
Define the preprocess function for input data
:param: image: the orignal input frame
:returns:
resized_image: the image processed
"""
resized_image = cv2.resize(image, shape)
resized_image = cv2.cvtColor(np.array(resized_image), cv2.COLOR_BGR2RGB)
resized_image = resized_image.transpose((2, 0, 1))
resized_image = np.expand_dims(resized_image, axis=0).astype(np.float32)
return resized_image
def postprocess(result, image, fps):
"""
Define the postprocess function for output data
:param: result: the inference results
image: the orignal input frame
fps: average throughput calculated for each frame
:returns:
image: the image with bounding box and fps message
"""
detections = result.reshape(-1, 7)
for i, detection in enumerate(detections):
_, image_id, confidence, xmin, ymin, xmax, ymax = detection
if confidence > 0.5:
xmin = int(max((xmin * image.shape[1]), 10))
ymin = int(max((ymin * image.shape[0]), 10))
xmax = int(min((xmax * image.shape[1]), image.shape[1] - 10))
ymax = int(min((ymax * image.shape[0]), image.shape[0] - 10))
cv2.rectangle(image, (xmin, ymin), (xmax, ymax), (0, 255, 0), 2)
cv2.putText(
image,
str(round(fps, 2)) + " fps",
(5, 20),
cv2.FONT_HERSHEY_SIMPLEX,
0.7,
(0, 255, 0),
3,
)
return image
Get the test video#
video_url = "https://storage.openvinotoolkit.org/repositories/openvino_notebooks/data/data/video/CEO%20Pat%20Gelsinger%20on%20Leading%20Intel.mp4"
video_path = Path("data/test_video.mp4")
if not video_path.exists():
utils.download_file(video_url, video_path.name, video_path.parent)
test_video.mp4: 0%| | 0.00/1.55M [00:00<?, ?B/s]
How to improve the throughput of video processing#
Below, we compare the performance of the synchronous and async-based approaches:
Sync Mode (default)#
Let us see how video processing works with the default approach. Using the synchronous approach, the frame is captured with OpenCV and then immediately processed:

drawing#
while(true) {
// capture frame
// populate CURRENT InferRequest
// Infer CURRENT InferRequest
//this call is synchronous
// display CURRENT result
}
```
def sync_api(source, flip, fps, use_popup, skip_first_frames):
"""
Define the main function for video processing in sync mode
:param: source: the video path or the ID of your webcam
:returns:
sync_fps: the inference throughput in sync mode
"""
frame_number = 0
infer_request = compiled_model.create_infer_request()
player = None
try:
# Create a video player
player = utils.VideoPlayer(source, flip=flip, fps=fps, skip_first_frames=skip_first_frames)
# Start capturing
start_time = time.time()
player.start()
if use_popup:
title = "Press ESC to Exit"
cv2.namedWindow(title, cv2.WINDOW_GUI_NORMAL | cv2.WINDOW_AUTOSIZE)
while True:
frame = player.next()
if frame is None:
print("Source ended")
break
resized_frame = preprocess(frame)
infer_request.set_tensor(input_layer_ir, ov.Tensor(resized_frame))
# Start the inference request in synchronous mode
infer_request.infer()
res = infer_request.get_output_tensor(0).data
stop_time = time.time()
total_time = stop_time - start_time
frame_number = frame_number + 1
sync_fps = frame_number / total_time
frame = postprocess(res, frame, sync_fps)
# Display the results
if use_popup:
cv2.imshow(title, frame)
key = cv2.waitKey(1)
# escape = 27
if key == 27:
break
else:
# Encode numpy array to jpg
_, encoded_img = cv2.imencode(".jpg", frame, params=[cv2.IMWRITE_JPEG_QUALITY, 90])
# Create IPython image
i = display.Image(data=encoded_img)
# Display the image in this notebook
display.clear_output(wait=True)
display.display(i)
# ctrl-c
except KeyboardInterrupt:
print("Interrupted")
# Any different error
except RuntimeError as e:
print(e)
finally:
if use_popup:
cv2.destroyAllWindows()
if player is not None:
# stop capturing
player.stop()
return sync_fps
Test performance in Sync Mode#
sync_fps = sync_api(source=video_path, flip=False, fps=30, use_popup=False, skip_first_frames=800)
print(f"average throuput in sync mode: {sync_fps:.2f} fps")
Source ended
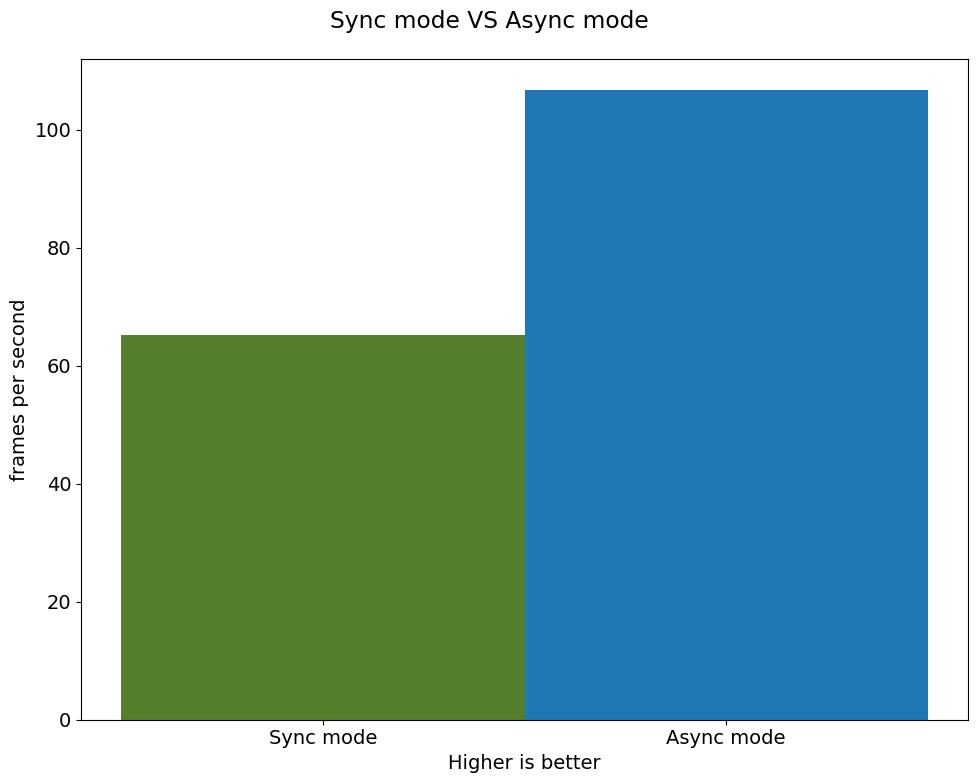
average throuput in sync mode: 65.23 fps
Async Mode#
Let us see how the OpenVINO Async API can improve the overall frame rate of an application. The key advantage of the Async approach is as follows: while a device is busy with the inference, the application can do other things in parallel (for example, populating inputs or scheduling other requests) rather than wait for the current inference to complete first.

drawing#
In the example below, inference is applied to the results of the video decoding. So it is possible to keep multiple infer requests, and while the current request is processed, the input frame for the next is being captured. This essentially hides the latency of capturing, so that the overall frame rate is rather determined only by the slowest part of the pipeline (decoding vs inference) and not by the sum of the stages.
while(true) {
// capture frame
// populate NEXT InferRequest
// start NEXT InferRequest
// this call is async and returns immediately
// wait for the CURRENT InferRequest
// display CURRENT result
// swap CURRENT and NEXT InferRequests
}
def async_api(source, flip, fps, use_popup, skip_first_frames):
"""
Define the main function for video processing in async mode
:param: source: the video path or the ID of your webcam
:returns:
async_fps: the inference throughput in async mode
"""
frame_number = 0
# Create 2 infer requests
curr_request = compiled_model.create_infer_request()
next_request = compiled_model.create_infer_request()
player = None
async_fps = 0
try:
# Create a video player
player = utils.VideoPlayer(source, flip=flip, fps=fps, skip_first_frames=skip_first_frames)
# Start capturing
start_time = time.time()
player.start()
if use_popup:
title = "Press ESC to Exit"
cv2.namedWindow(title, cv2.WINDOW_GUI_NORMAL | cv2.WINDOW_AUTOSIZE)
# Capture CURRENT frame
frame = player.next()
resized_frame = preprocess(frame)
curr_request.set_tensor(input_layer_ir, ov.Tensor(resized_frame))
# Start the CURRENT inference request
curr_request.start_async()
while True:
# Capture NEXT frame
next_frame = player.next()
if next_frame is None:
print("Source ended")
break
resized_frame = preprocess(next_frame)
next_request.set_tensor(input_layer_ir, ov.Tensor(resized_frame))
# Start the NEXT inference request
next_request.start_async()
# Waiting for CURRENT inference result
curr_request.wait()
res = curr_request.get_output_tensor(0).data
stop_time = time.time()
total_time = stop_time - start_time
frame_number = frame_number + 1
async_fps = frame_number / total_time
frame = postprocess(res, frame, async_fps)
# Display the results
if use_popup:
cv2.imshow(title, frame)
key = cv2.waitKey(1)
# escape = 27
if key == 27:
break
else:
# Encode numpy array to jpg
_, encoded_img = cv2.imencode(".jpg", frame, params=[cv2.IMWRITE_JPEG_QUALITY, 90])
# Create IPython image
i = display.Image(data=encoded_img)
# Display the image in this notebook
display.clear_output(wait=True)
display.display(i)
# Swap CURRENT and NEXT frames
frame = next_frame
# Swap CURRENT and NEXT infer requests
curr_request, next_request = next_request, curr_request
# ctrl-c
except KeyboardInterrupt:
print("Interrupted")
# Any different error
except RuntimeError as e:
print(e)
finally:
if use_popup:
cv2.destroyAllWindows()
if player is not None:
# stop capturing
player.stop()
return async_fps
Test the performance in Async Mode#
async_fps = async_api(source=video_path, flip=False, fps=30, use_popup=False, skip_first_frames=800)
print(f"average throuput in async mode: {async_fps:.2f} fps")
Source ended
average throuput in async mode: 106.63 fps
Compare the performance#
width = 0.4
fontsize = 14
plt.rc("font", size=fontsize)
fig, ax = plt.subplots(1, 1, figsize=(10, 8))
rects1 = ax.bar([0], sync_fps, width, color="#557f2d")
rects2 = ax.bar([width], async_fps, width)
ax.set_ylabel("frames per second")
ax.set_xticks([0, width])
ax.set_xticklabels(["Sync mode", "Async mode"])
ax.set_xlabel("Higher is better")
fig.suptitle("Sync mode VS Async mode")
fig.tight_layout()
plt.show()
AsyncInferQueue#
Asynchronous mode pipelines can be supported with the
AsyncInferQueue
wrapper class. This class automatically spawns the pool of
InferRequest objects (also called “jobs”) and provides
synchronization mechanisms to control the flow of the pipeline. It is a
simpler way to manage the infer request queue in Asynchronous mode.
Setting Callback#
When callback is set, any job that ends inference calls upon the
Python function. The callback function must have two arguments: one
is the request that calls the callback, which provides the
InferRequest API; the other is called “user data”, which provides
the possibility of passing runtime values.
def callback(infer_request, info) -> None:
"""
Define the callback function for postprocessing
:param: infer_request: the infer_request object
info: a tuple includes original frame and starts time
:returns:
None
"""
global frame_number
global total_time
global inferqueue_fps
stop_time = time.time()
frame, start_time = info
total_time = stop_time - start_time
frame_number = frame_number + 1
inferqueue_fps = frame_number / total_time
res = infer_request.get_output_tensor(0).data[0]
frame = postprocess(res, frame, inferqueue_fps)
# Encode numpy array to jpg
_, encoded_img = cv2.imencode(".jpg", frame, params=[cv2.IMWRITE_JPEG_QUALITY, 90])
# Create IPython image
i = display.Image(data=encoded_img)
# Display the image in this notebook
display.clear_output(wait=True)
display.display(i)
def inferqueue(source, flip, fps, skip_first_frames) -> None:
"""
Define the main function for video processing with async infer queue
:param: source: the video path or the ID of your webcam
:retuns:
None
"""
# Create infer requests queue
infer_queue = ov.AsyncInferQueue(compiled_model, 2)
infer_queue.set_callback(callback)
player = None
try:
# Create a video player
player = utils.VideoPlayer(source, flip=flip, fps=fps, skip_first_frames=skip_first_frames)
# Start capturing
start_time = time.time()
player.start()
while True:
# Capture frame
frame = player.next()
if frame is None:
print("Source ended")
break
resized_frame = preprocess(frame)
# Start the inference request with async infer queue
infer_queue.start_async({input_layer_ir.any_name: resized_frame}, (frame, start_time))
except KeyboardInterrupt:
print("Interrupted")
# Any different error
except RuntimeError as e:
print(e)
finally:
infer_queue.wait_all()
player.stop()
Test the performance with AsyncInferQueue#
frame_number = 0
total_time = 0
inferqueue(source=video_path, flip=False, fps=30, skip_first_frames=800)
print(f"average throughput in async mode with async infer queue: {inferqueue_fps:.2f} fps")
average throughput in async mode with async infer queue: 146.24 fps