Depth estimation with DepthAnything and OpenVINO#
This Jupyter notebook can be launched on-line, opening an interactive environment in a browser window. You can also make a local installation. Choose one of the following options:



Depth Anything is a highly
practical solution for robust monocular depth estimation. Without
pursuing novel technical modules, this project aims to build a simple
yet powerful foundation model dealing with any images under any
circumstances. The framework of Depth Anything is shown below. it adopts
a standard pipeline to unleashing the power of large-scale unlabeled
images. 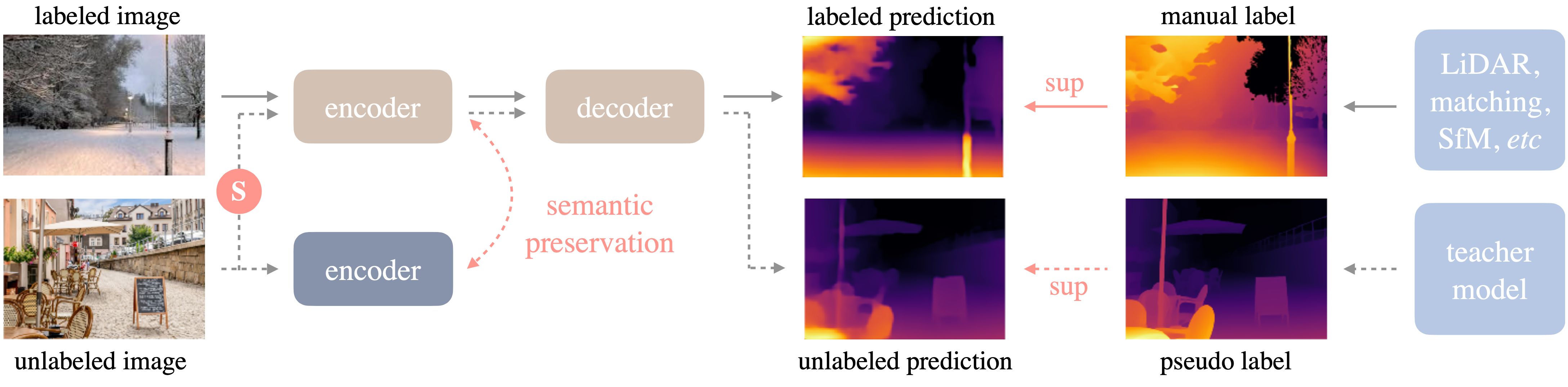
More details about model can be found in project web page, paper and official repository
In this tutorial we will explore how to convert and run DepthAnything using OpenVINO. An additional part demonstrates how to run quantization with NNCF to speed up the model.
Table of contents:
Installation Instructions#
This is a self-contained example that relies solely on its own code.
We recommend running the notebook in a virtual environment. You only need a Jupyter server to start. For details, please refer to Installation Guide.
Prerequisites#
import requests
from pathlib import Path
if not Path("cmd_helper.py").exists():
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/cmd_helper.py",
)
open("cmd_helper.py", "w").write(r.text)
from cmd_helper import clone_repo
repo_dir = clone_repo("https://github.com/LiheYoung/Depth-Anything")
%cd $repo_dir
/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/875/archive/.workspace/scm/ov-notebook/notebooks/depth-anything/Depth-Anything
import platform
%pip install -q "openvino>=2023.3.0" "datasets>=2.14.6" "nncf" "tqdm"
%pip install -q "typing-extensions>=4.9.0" eval-type-backport "gradio>=4.19" "matplotlib>=3.4"
%pip install -q torch torchvision "opencv-python" huggingface_hub --extra-index-url https://download.pytorch.org/whl/cpu
if platform.system() == "Darwin":
%pip install -q "numpy<2.0.0"
if platform.python_version_tuple()[1] in ["8", "9"]:
%pip install -q "gradio-imageslider<=0.0.17" "typing-extensions>=4.9.0"
if not Path("notebook_utils.py").exists():
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/notebook_utils.py",
)
open("notebook_utils.py", "w").write(r.text)
Note: you may need to restart the kernel to use updated packages.
Note: you may need to restart the kernel to use updated packages.
Note: you may need to restart the kernel to use updated packages.
Note: you may need to restart the kernel to use updated packages.
Load and run PyTorch model#
To be able run PyTorch model on CPU, we should disable xformers attention optimizations first.
from pathlib import Path
# Read more about telemetry collection at https://github.com/openvinotoolkit/openvino_notebooks?tab=readme-ov-file#-telemetry
from notebook_utils import collect_telemetry
collect_telemetry("depth-anything.ipynb")
attention_file_path = Path("./torchhub/facebookresearch_dinov2_main/dinov2/layers/attention.py")
orig_attention_path = attention_file_path.parent / ("orig_" + attention_file_path.name)
if not orig_attention_path.exists():
attention_file_path.rename(orig_attention_path)
with orig_attention_path.open("r") as f:
data = f.read()
data = data.replace("XFORMERS_AVAILABLE = True", "XFORMERS_AVAILABLE = False")
with attention_file_path.open("w") as out_f:
out_f.write(data)
DepthAnything.from_pretrained method creates PyTorch model class
instance and load model weights. There are 3 available models in
repository depends on VIT encoder size: * Depth-Anything-ViT-Small
(24.8M) * Depth-Anything-ViT-Base (97.5M) * Depth-Anything-ViT-Large
(335.3M)
We will use Depth-Anything-ViT-Small, but the same steps for running
model and converting to OpenVINO are applicable for other models from
DepthAnything family.
from depth_anything.dpt import DepthAnything
encoder = "vits" # can also be 'vitb' or 'vitl'
model_id = "depth_anything_{:}14".format(encoder)
depth_anything = DepthAnything.from_pretrained(f"LiheYoung/{model_id}")
xFormers not available
xFormers not available
Prepare input data#
from PIL import Image
from notebook_utils import download_file, device_widget, quantization_widget
if not Path("furseal.png").exists():
download_file(
"https://github.com/openvinotoolkit/openvino_notebooks/assets/29454499/3f779fc1-c1b2-4dec-915a-64dae510a2bb",
"furseal.png",
)
Image.open("furseal.png").resize((600, 400))
furseal.png: 0%| | 0.00/2.55M [00:00<?, ?B/s]

for simplicity of usage, model authors provide helper functions for preprocessing input image. The main conditions are that image size should be divisible on 14 (size of vit patch) and normalized in [0, 1] range.
from depth_anything.util.transform import Resize, NormalizeImage, PrepareForNet
from torchvision.transforms import Compose
import cv2
import torch
transform = Compose(
[
Resize(
width=518,
height=518,
resize_target=False,
ensure_multiple_of=14,
resize_method="lower_bound",
image_interpolation_method=cv2.INTER_CUBIC,
),
NormalizeImage(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
PrepareForNet(),
]
)
image = cv2.cvtColor(cv2.imread("furseal.png"), cv2.COLOR_BGR2RGB) / 255.0
h, w = image.shape[:-1]
image = transform({"image": image})["image"]
image = torch.from_numpy(image).unsqueeze(0)
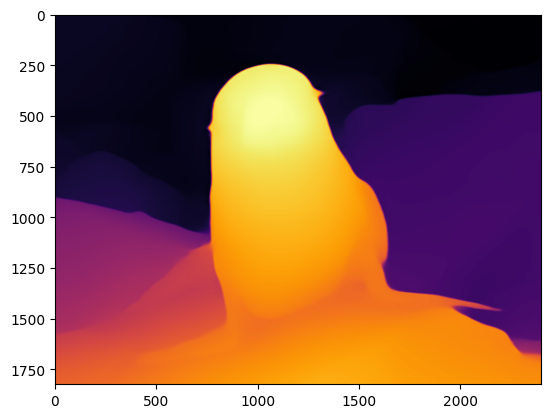
Run model inference#
Preprocessed image passed to model forward and model returns depth map
in format B x H x W, where B is input batch size, H
is preprocessed image height, W is preprocessed image width.
# depth shape: 1xHxW
depth = depth_anything(image)
After image processing finished, we can resize depth map into original image size and prepare it for visualization.
import torch.nn.functional as F
import numpy as np
depth = F.interpolate(depth[None], (h, w), mode="bilinear", align_corners=False)[0, 0]
depth = (depth - depth.min()) / (depth.max() - depth.min()) * 255.0
depth = depth.cpu().detach().numpy().astype(np.uint8)
depth_color = cv2.applyColorMap(depth, cv2.COLORMAP_INFERNO)
from matplotlib import pyplot as plt
plt.imshow(depth_color[:, :, ::-1]);
Convert Model to OpenVINO IR format#
OpenVINO supports PyTorch models via conversion to OpenVINO Intermediate
Representation (IR). OpenVINO model conversion API should be used for
these purposes. ov.convert_model function accepts original PyTorch
model instance and example input for tracing and returns ov.Model
representing this model in OpenVINO framework. Converted model can be
used for saving on disk using ov.save_model function or directly
loading on device using core.complie_model.
import openvino as ov
OV_DEPTH_ANYTHING_PATH = Path(f"{model_id}.xml")
if not OV_DEPTH_ANYTHING_PATH.exists():
ov_model = ov.convert_model(depth_anything, example_input=image, input=[1, 3, 518, 518])
ov.save_model(ov_model, OV_DEPTH_ANYTHING_PATH)
/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/875/archive/.workspace/scm/ov-notebook/notebooks/depth-anything/Depth-Anything/torchhub/facebookresearch_dinov2_main/dinov2/layers/patch_embed.py:73: TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
assert H % patch_H == 0, f"Input image height {H} is not a multiple of patch height {patch_H}"
/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/875/archive/.workspace/scm/ov-notebook/notebooks/depth-anything/Depth-Anything/torchhub/facebookresearch_dinov2_main/dinov2/layers/patch_embed.py:74: TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
assert W % patch_W == 0, f"Input image width {W} is not a multiple of patch width: {patch_W}"
/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/875/archive/.workspace/scm/ov-notebook/notebooks/depth-anything/Depth-Anything/torchhub/facebookresearch_dinov2_main/vision_transformer.py:183: TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
if npatch == N and w == h:
/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/875/archive/.workspace/scm/ov-notebook/notebooks/depth-anything/Depth-Anything/depth_anything/dpt.py:133: TracerWarning: Converting a tensor to a Python integer might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
out = F.interpolate(out, (int(patch_h * 14), int(patch_w * 14)), mode="bilinear", align_corners=True)
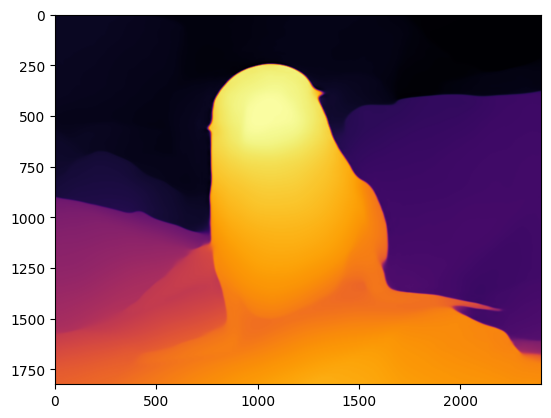
Run OpenVINO model inference#
Now, we are ready to run OpenVINO model
Select inference device#
For starting work, please select inference device from dropdown list.
device = device_widget()
device
Dropdown(description='Device:', index=1, options=('CPU', 'AUTO'), value='AUTO')
core = ov.Core()
compiled_model = core.compile_model(OV_DEPTH_ANYTHING_PATH, device.value)
Run inference on image#
res = compiled_model(image)[0]
def get_depth_map(model_output):
depth = model_output[0]
depth = cv2.resize(depth, (w, h))
depth = (depth - depth.min()) / (depth.max() - depth.min()) * 255.0
depth = depth.astype(np.uint8)
depth_color = cv2.applyColorMap(depth, cv2.COLORMAP_INFERNO)
return depth_color
depth_color = get_depth_map(res)
plt.imshow(depth_color[:, :, ::-1]);
Run inference on video#
if not Path("Coco Walking in Berkeley.mp4").exists():
download_file(
"https://storage.openvinotoolkit.org/repositories/openvino_notebooks/data/data/video/Coco%20Walking%20in%20Berkeley.mp4",
"./Coco Walking in Berkeley.mp4",
)
VIDEO_FILE = "./Coco Walking in Berkeley.mp4"
# Number of seconds of input video to process. Set `NUM_SECONDS` to 0 to process
# the full video.
NUM_SECONDS = 4
# Set `ADVANCE_FRAMES` to 1 to process every frame from the input video
# Set `ADVANCE_FRAMES` to 2 to process every second frame. This reduces
# the time it takes to process the video.
ADVANCE_FRAMES = 2
# Set `SCALE_OUTPUT` to reduce the size of the result video
# If `SCALE_OUTPUT` is 0.5, the width and height of the result video
# will be half the width and height of the input video.
SCALE_OUTPUT = 0.5
# The format to use for video encoding. The 'vp09` is slow,
# but it works on most systems.
# Try the `THEO` encoding if you have FFMPEG installed.
# FOURCC = cv2.VideoWriter_fourcc(*"THEO")
FOURCC = cv2.VideoWriter_fourcc(*"vp09")
# Create Path objects for the input video and the result video.
output_directory = Path("output")
output_directory.mkdir(exist_ok=True)
result_video_path = output_directory / f"{Path(VIDEO_FILE).stem}_depth_anything.mp4"
Coco Walking in Berkeley.mp4: 0%| | 0.00/877k [00:00<?, ?B/s]
cap = cv2.VideoCapture(str(VIDEO_FILE))
ret, image = cap.read()
if not ret:
raise ValueError(f"The video at {VIDEO_FILE} cannot be read.")
input_fps = cap.get(cv2.CAP_PROP_FPS)
input_video_frame_height, input_video_frame_width = image.shape[:2]
target_fps = input_fps / ADVANCE_FRAMES
target_frame_height = int(input_video_frame_height * SCALE_OUTPUT)
target_frame_width = int(input_video_frame_width * SCALE_OUTPUT)
cap.release()
print(f"The input video has a frame width of {input_video_frame_width}, " f"frame height of {input_video_frame_height} and runs at {input_fps:.2f} fps")
print(
"The output video will be scaled with a factor "
f"{SCALE_OUTPUT}, have width {target_frame_width}, "
f" height {target_frame_height}, and run at {target_fps:.2f} fps"
)
The input video has a frame width of 640, frame height of 360 and runs at 30.00 fps
The output video will be scaled with a factor 0.5, have width 320, height 180, and run at 15.00 fps
def normalize_minmax(data):
"""Normalizes the values in `data` between 0 and 1"""
return (data - data.min()) / (data.max() - data.min())
def convert_result_to_image(result, colormap="viridis"):
"""
Convert network result of floating point numbers to an RGB image with
integer values from 0-255 by applying a colormap.
`result` is expected to be a single network result in 1,H,W shape
`colormap` is a matplotlib colormap.
See https://matplotlib.org/stable/tutorials/colors/colormaps.html
"""
result = result.squeeze(0)
result = normalize_minmax(result)
result = result * 255
result = result.astype(np.uint8)
result = cv2.applyColorMap(result, cv2.COLORMAP_INFERNO)[:, :, ::-1]
return result
def to_rgb(image_data) -> np.ndarray:
"""
Convert image_data from BGR to RGB
"""
return cv2.cvtColor(image_data, cv2.COLOR_BGR2RGB)
import time
from IPython.display import (
HTML,
FileLink,
Pretty,
ProgressBar,
Video,
clear_output,
display,
)
def process_video(compiled_model, video_file, result_video_path):
# Initialize variables.
input_video_frame_nr = 0
start_time = time.perf_counter()
total_inference_duration = 0
# Open the input video
cap = cv2.VideoCapture(str(video_file))
# Create a result video.
out_video = cv2.VideoWriter(
str(result_video_path),
FOURCC,
target_fps,
(target_frame_width * 2, target_frame_height),
)
num_frames = int(NUM_SECONDS * input_fps)
total_frames = cap.get(cv2.CAP_PROP_FRAME_COUNT) if num_frames == 0 else num_frames
progress_bar = ProgressBar(total=total_frames)
progress_bar.display()
try:
while cap.isOpened():
ret, image = cap.read()
if not ret:
cap.release()
break
if input_video_frame_nr >= total_frames:
break
h, w = image.shape[:-1]
input_image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB) / 255.0
input_image = transform({"image": input_image})["image"]
# Reshape the image to network input shape NCHW.
input_image = np.expand_dims(input_image, 0)
# Do inference.
inference_start_time = time.perf_counter()
result = compiled_model(input_image)[0]
inference_stop_time = time.perf_counter()
inference_duration = inference_stop_time - inference_start_time
total_inference_duration += inference_duration
if input_video_frame_nr % (10 * ADVANCE_FRAMES) == 0:
clear_output(wait=True)
progress_bar.display()
# input_video_frame_nr // ADVANCE_FRAMES gives the number of
# Frames that have been processed by the network.
display(
Pretty(
f"Processed frame {input_video_frame_nr // ADVANCE_FRAMES}"
f"/{total_frames // ADVANCE_FRAMES}. "
f"Inference time per frame: {inference_duration:.2f} seconds "
f"({1/inference_duration:.2f} FPS)"
)
)
# Transform the network result to a RGB image.
result_frame = to_rgb(convert_result_to_image(result))
# Resize the image and the result to a target frame shape.
result_frame = cv2.resize(result_frame, (target_frame_width, target_frame_height))
image = cv2.resize(image, (target_frame_width, target_frame_height))
# Put the image and the result side by side.
stacked_frame = np.hstack((image, result_frame))
# Save a frame to the video.
out_video.write(stacked_frame)
input_video_frame_nr = input_video_frame_nr + ADVANCE_FRAMES
cap.set(1, input_video_frame_nr)
progress_bar.progress = input_video_frame_nr
progress_bar.update()
except KeyboardInterrupt:
print("Processing interrupted.")
finally:
clear_output()
processed_frames = num_frames // ADVANCE_FRAMES
out_video.release()
cap.release()
end_time = time.perf_counter()
duration = end_time - start_time
print(
f"Processed {processed_frames} frames in {duration:.2f} seconds. "
f"Total FPS (including video processing): {processed_frames/duration:.2f}."
f"Inference FPS: {processed_frames/total_inference_duration:.2f} "
)
print(f"Video saved to '{str(result_video_path)}'.")
return stacked_frame
stacked_frame = process_video(compiled_model, VIDEO_FILE, result_video_path)
Processed 60 frames in 13.17 seconds. Total FPS (including video processing): 4.56.Inference FPS: 10.67
Video saved to 'output/Coco Walking in Berkeley_depth_anything.mp4'.
def display_video(stacked_frame):
video = Video(result_video_path, width=800, embed=True)
if not result_video_path.exists():
plt.imshow(stacked_frame)
raise ValueError("OpenCV was unable to write the video file. Showing one video frame.")
else:
print(f"Showing video saved at\n{result_video_path.resolve()}")
print("If you cannot see the video in your browser, please click on the " "following link to download the video ")
video_link = FileLink(result_video_path)
video_link.html_link_str = "<a href='%s' download>%s</a>"
display(HTML(video_link._repr_html_()))
display(video)
display_video(stacked_frame)
Showing video saved at
/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/875/archive/.workspace/scm/ov-notebook/notebooks/depth-anything/Depth-Anything/output/Coco Walking in Berkeley_depth_anything.mp4
If you cannot see the video in your browser, please click on the following link to download the video
Quantization#
NNCF enables
post-training quantization by adding quantization layers into model
graph and then using a subset of the training dataset to initialize the
parameters of these additional quantization layers. Quantized operations
are executed in INT8 instead of FP32/FP16 making model
inference faster.
The optimization process contains the following steps:
Create a calibration dataset for quantization.
Run
nncf.quantize()to obtain quantized model.Save the
INT8model usingopenvino.save_model()function.
Please select below whether you would like to run quantization to improve model inference speed.
to_quantize = quantization_widget()
to_quantize
Checkbox(value=True, description='Quantization')
# Fetch `skip_kernel_extension` module
if not Path("skip_kernel_extension.py").exists():
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/skip_kernel_extension.py",
)
open("skip_kernel_extension.py", "w").write(r.text)
OV_DEPTH_ANYTHING_INT8_PATH = Path(f"{model_id}_int8.xml")
%load_ext skip_kernel_extension
Prepare calibration dataset#
We use a portion of Nahrawy/VIDIT-Depth-ControlNet dataset from Hugging Face as calibration data.
%%skip not $to_quantize.value
import datasets
if not OV_DEPTH_ANYTHING_INT8_PATH.exists():
subset_size = 300
calibration_data = []
dataset = datasets.load_dataset("Nahrawy/VIDIT-Depth-ControlNet", split="train", streaming=True).shuffle(seed=42).take(subset_size)
for batch in dataset:
image = np.array(batch["image"])[...,:3]
image = image / 255.0
image = transform({'image': image})['image']
image = np.expand_dims(image, 0)
calibration_data.append(image)
Resolving data files: 0%| | 0/42 [00:00<?, ?it/s]
Run quantization#
Create a quantized model from the pre-trained converted OpenVINO model. > NOTE: Quantization is time and memory consuming operation. Running quantization code below may take some time.
%%skip not $to_quantize.value
import nncf
if not OV_DEPTH_ANYTHING_INT8_PATH.exists():
model = core.read_model(OV_DEPTH_ANYTHING_PATH)
quantized_model = nncf.quantize(
model=model,
subset_size=subset_size,
model_type=nncf.ModelType.TRANSFORMER,
calibration_dataset=nncf.Dataset(calibration_data),
)
ov.save_model(quantized_model, OV_DEPTH_ANYTHING_INT8_PATH)
INFO:nncf:NNCF initialized successfully. Supported frameworks detected: torch, tensorflow, onnx, openvino
2025-02-04 00:12:23.299021: I tensorflow/core/util/port.cc:110] oneDNN custom operations are on. You may see slightly different numerical results due to floating-point round-off errors from different computation orders. To turn them off, set the environment variable TF_ENABLE_ONEDNN_OPTS=0. 2025-02-04 00:12:23.331758: I tensorflow/core/platform/cpu_feature_guard.cc:182] This TensorFlow binary is optimized to use available CPU instructions in performance-critical operations. To enable the following instructions: AVX2 AVX512F AVX512_VNNI FMA, in other operations, rebuild TensorFlow with the appropriate compiler flags. 2025-02-04 00:12:23.910412: W tensorflow/compiler/tf2tensorrt/utils/py_utils.cc:38] TF-TRT Warning: Could not find TensorRT
Output()
Output()
Output()
Output()
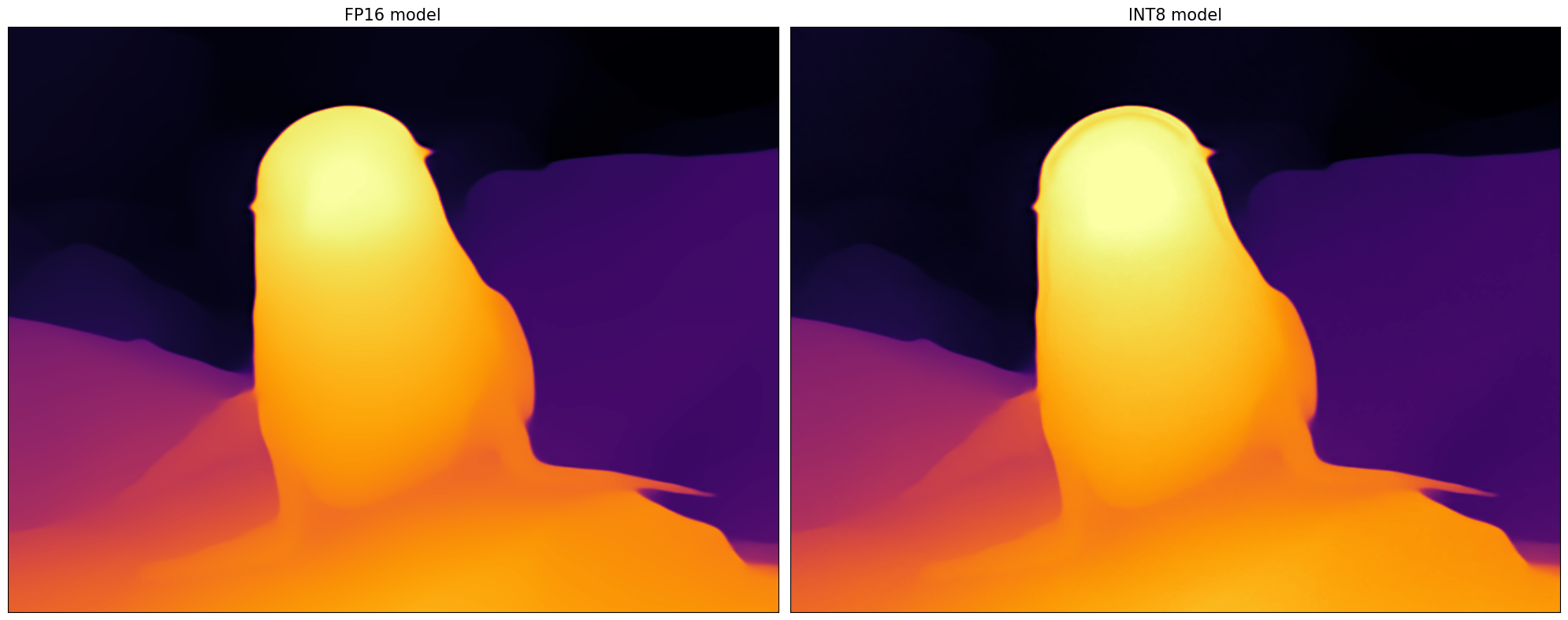
Let us check predictions with the quantized model using the same input data.
%%skip not $to_quantize.value
def visualize_results(orig_img:Image.Image, optimized_img:Image.Image):
"""
Helper function for results visualization
Parameters:
orig_img (Image.Image): generated image using FP16 model
optimized_img (Image.Image): generated image using quantized model
Returns:
fig (matplotlib.pyplot.Figure): matplotlib generated figure contains drawing result
"""
orig_title = "FP16 model"
control_title = "INT8 model"
figsize = (20, 20)
fig, axs = plt.subplots(1, 2, figsize=figsize, sharex='all', sharey='all')
list_axes = list(axs.flat)
for a in list_axes:
a.set_xticklabels([])
a.set_yticklabels([])
a.get_xaxis().set_visible(False)
a.get_yaxis().set_visible(False)
a.grid(False)
list_axes[0].imshow(np.array(orig_img))
list_axes[1].imshow(np.array(optimized_img))
list_axes[0].set_title(orig_title, fontsize=15)
list_axes[1].set_title(control_title, fontsize=15)
fig.subplots_adjust(wspace=0.01, hspace=0.01)
fig.tight_layout()
return fig
%%skip not $to_quantize.value
image = cv2.cvtColor(cv2.imread('furseal.png'), cv2.COLOR_BGR2RGB) / 255.0
image = transform({'image': image})['image']
image = torch.from_numpy(image).unsqueeze(0)
int8_compiled_model = core.compile_model(OV_DEPTH_ANYTHING_INT8_PATH, device.value)
int8_res = int8_compiled_model(image)[0]
int8_depth_color = get_depth_map(int8_res)
%%skip not $to_quantize.value
visualize_results(depth_color[:, :, ::-1], int8_depth_color[:, :, ::-1])
%%skip not $to_quantize.value
int8_result_video_path = output_directory / f"{Path(VIDEO_FILE).stem}_depth_anything_int8.mp4"
stacked_frame = process_video(int8_compiled_model, VIDEO_FILE, int8_result_video_path)
display_video(stacked_frame)
Processed 60 frames in 13.30 seconds. Total FPS (including video processing): 4.51.Inference FPS: 11.47
Video saved to 'output/Coco Walking in Berkeley_depth_anything_int8.mp4'.
Showing video saved at
/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/875/archive/.workspace/scm/ov-notebook/notebooks/depth-anything/Depth-Anything/output/Coco Walking in Berkeley_depth_anything.mp4
If you cannot see the video in your browser, please click on the following link to download the video
%%skip not $to_quantize.value
fp16_ir_model_size = OV_DEPTH_ANYTHING_PATH.with_suffix(".bin").stat().st_size / 2**20
quantized_model_size = OV_DEPTH_ANYTHING_INT8_PATH.with_suffix(".bin").stat().st_size / 2**20
print(f"FP16 model size: {fp16_ir_model_size:.2f} MB")
print(f"INT8 model size: {quantized_model_size:.2f} MB")
print(f"Model compression rate: {fp16_ir_model_size / quantized_model_size:.3f}")
FP16 model size: 47.11 MB
INT8 model size: 24.41 MB
Model compression rate: 1.930
Compare inference time of the FP16 and INT8 models#
To measure the inference performance of OpenVINO FP16 and INT8 models, use Benchmark Tool.
NOTE: For the most accurate performance estimation, it is recommended to run
benchmark_appin a terminal/command prompt after closing other applications.
import re
def get_fps(benchmark_output: str):
parsed_output = [line for line in benchmark_output if "Throughput:" in line]
fps = re.findall(r"\d+\.\d+", parsed_output[0])[0]
return fps
if OV_DEPTH_ANYTHING_INT8_PATH.exists():
benchmark_output = !benchmark_app -m $OV_DEPTH_ANYTHING_PATH -d $device.value -api async
original_fps = get_fps(benchmark_output)
print(f"FP16 Throughput: {original_fps} FPS")
benchmark_output = !benchmark_app -m $OV_DEPTH_ANYTHING_INT8_PATH -d $device.value -api async
optimized_fps = get_fps(benchmark_output)
print(f"INT8 Throughput: {optimized_fps} FPS")
print(f"Speed-up: {float(optimized_fps) / float(original_fps):.2f}")
FP16 Throughput: 10.68 FPS
INT8 Throughput: 14.11 FPS
Speed-up: 1.32
Interactive demo#
You can apply model on own images. You can move the slider on the resulting image to switch between the original image and the depth map view.
Please select below whether you would like to use the quantized model to launch the interactive demo.
import ipywidgets as widgets
quantized_model_present = OV_DEPTH_ANYTHING_INT8_PATH.exists()
use_quantized_model = widgets.Checkbox(
value=True if quantized_model_present else False,
description="Use quantized model",
disabled=False,
)
use_quantized_model
Checkbox(value=True, description='Use quantized model')
import numpy as np
import cv2
import tempfile
if use_quantized_model.value:
compiled_model = core.compile_model(OV_DEPTH_ANYTHING_INT8_PATH, device.value)
def predict_depth(model, image):
return model(image)[0]
def on_submit(image):
original_image = image.copy()
h, w = image.shape[:2]
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB) / 255.0
image = transform({"image": image})["image"]
image = np.expand_dims(image, 0)
depth = predict_depth(compiled_model, image)
depth = cv2.resize(depth[0], (w, h), interpolation=cv2.INTER_LINEAR)
depth = (depth - depth.min()) / (depth.max() - depth.min()) * 255.0
depth = depth.astype(np.uint8)
colored_depth = cv2.applyColorMap(depth, cv2.COLORMAP_INFERNO)[:, :, ::-1]
colored_depth_img = Image.fromarray(colored_depth)
tmp = tempfile.NamedTemporaryFile(suffix=".png", delete=False)
colored_depth_img.save(tmp.name)
return [(original_image, colored_depth), tmp.name]
# Go back to the depth-anything notebook directory
%cd ..
if not Path("gradio_helper.py").exists():
r = requests.get(url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/notebooks/depth-anything/gradio_helper.py")
open("gradio_helper.py", "w").write(r.text)
from gradio_helper import make_demo
demo = make_demo(fn=on_submit, examples_dir="Depth-Anything/assets/examples")
try:
demo.queue().launch(debug=False)
except Exception:
demo.queue().launch(share=True, debug=False)
# if you are launching remotely, specify server_name and server_port
# demo.launch(server_name='your server name', server_port='server port in int')
# Read more in the docs: https://gradio.app/docs/
/opt/home/k8sworker/ci-ai/cibuilds/jobs/ov-notebook/jobs/OVNotebookOps/builds/875/archive/.workspace/scm/ov-notebook/notebooks/depth-anything Running on local URL: http://127.0.0.1:7860 To create a public link, set share=True in launch().