Text-to-Image Generation with LCM LoRA and ControlNet Conditioning#
This Jupyter notebook can be launched after a local installation only.

Diffusion models make a revolution in AI-generated art. This technology enables the creation of high-quality images simply by writing a text prompt. Even though this technology gives very promising results, the diffusion process, in the first order, is the process of generating images from random noise and text conditions, which do not always clarify how desired content should look, which forms it should have, and where it is located in relation to other objects on the image. Researchers have been looking for ways to have more control over the results of the generation process. ControlNet provides a minimal interface allowing users to customize the generation process to a great extent.
ControlNet was introduced in Adding Conditional Control to Text-to-Image Diffusion Models paper. It provides a framework that enables support for various spatial contexts such as a depth map, a segmentation map, a scribble, and key points that can serve as additional conditionings to Diffusion models such as Stable Diffusion.
Latent Consistency Models (LCM) are a way to decrease the number of steps required to generate an image with Stable Diffusion (or SDXL) by distilling the original model into another version that requires fewer steps (4 to 8 instead of the original 25 to 50). Distillation is a type of training procedure that attempts to replicate the outputs from a source model using a new one. The distilled model may be designed to be smaller or, in this case, require fewer steps to run. It’s usually a lengthy and costly process that requires huge amounts of data, patience, and powerful training hardware.
For latent consistency distillation, each model needs to be distilled separately. The LCM LoRA allows to train just a small number of adapters, known as LoRA layers, instead of the full model. The resulting LoRAs can then be applied to any fine-tuned version of the model without having to distil them separately. The benefit of this LCM LoRA distillation process is that it can be integrated into the existing inference pipelines without changes to the main code, for example, into the ControlNet-guided Stable Diffusion pipeline. More details about LCM LoRA can be found in the technical report and blog post
This notebook explores how to speed up ControlNet pipeline using LCM LoRA, OpenVINO and quantization with NNCF. Let us get “controlling”!
Table of contents:
Load Original Diffusers pipeline and prepare models for conversion
Convert models to OpenVINO Intermediate representation (IR) format
Running Text-to-Image Generation with ControlNet Conditioning and OpenVINO
Installation Instructions#
This is a self-contained example that relies solely on its own code.
We recommend running the notebook in a virtual environment. You only need a Jupyter server to start. For details, please refer to Installation Guide.
Background#
Stable Diffusion#
Stable Diffusion is a text-to-image latent diffusion model created by researchers and engineers from CompVis, Stability AI, and LAION. Diffusion models as mentioned above can generate high-quality images. Stable Diffusion is based on a particular type of diffusion model called Latent Diffusion, proposed in High-Resolution Image Synthesis with Latent Diffusion Models paper. Generally speaking, diffusion models are machine learning systems that are trained to denoise random Gaussian noise step by step, to get to a sample of interest, such as an image. Diffusion models have been shown to achieve state-of-the-art results for generating image data. But one downside of diffusion models is that the reverse denoising process is slow because of its repeated, sequential nature. In addition, these models consume a lot of memory because they operate in pixel space, which becomes huge when generating high-resolution images. Latent diffusion can reduce the memory and compute complexity by applying the diffusion process over a lower dimensional latent space, instead of using the actual pixel space. This is the key difference between standard diffusion and latent diffusion models: in latent diffusion, the model is trained to generate latent (compressed) representations of the images.
There are three main components in latent diffusion:
A text-encoder, for example CLIP’s Text Encoder for creation condition to generate image from text prompt.
A U-Net for step-by-step denoising latent image representation.
An autoencoder (VAE) for encoding input image to latent space (if required) and decoding latent space to image back after generation.
For more details regarding Stable Diffusion work, refer to the project website. There is a tutorial for Stable Diffusion Text-to-Image generation with OpenVINO, see the following notebook.
ControlNet#
ControlNet is a neural network structure to control diffusion models by adding extra conditions. Using this new framework, we can capture a scene, structure, object, or subject pose from an inputted image, and then transfer that quality to the generation process. In practice, this enables the model to completely retain the original input shape, and create a novel image that conserves the shape, pose, or outline while using the novel features from the inputted prompt.
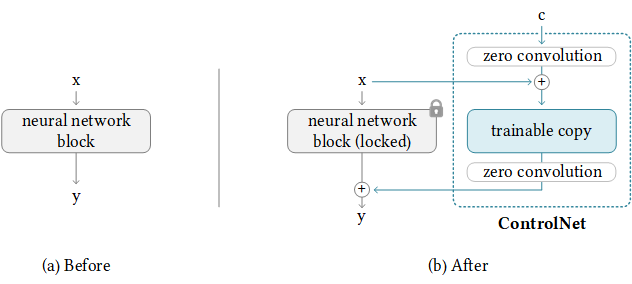
controlnet block#
Functionally, ControlNet operates by wrapping around an image synthesis process to impart attention to the shape required to operate the model using either its inbuilt prediction or one of many additional annotator models. Referring to the diagram above, we can see, on a rudimentary level, how ControlNet uses a trainable copy in conjunction with the original network to modify the final output with respect to the shape of the input control source.
By repeating the above simple structure 14 times, we can control stable diffusion in the following way:
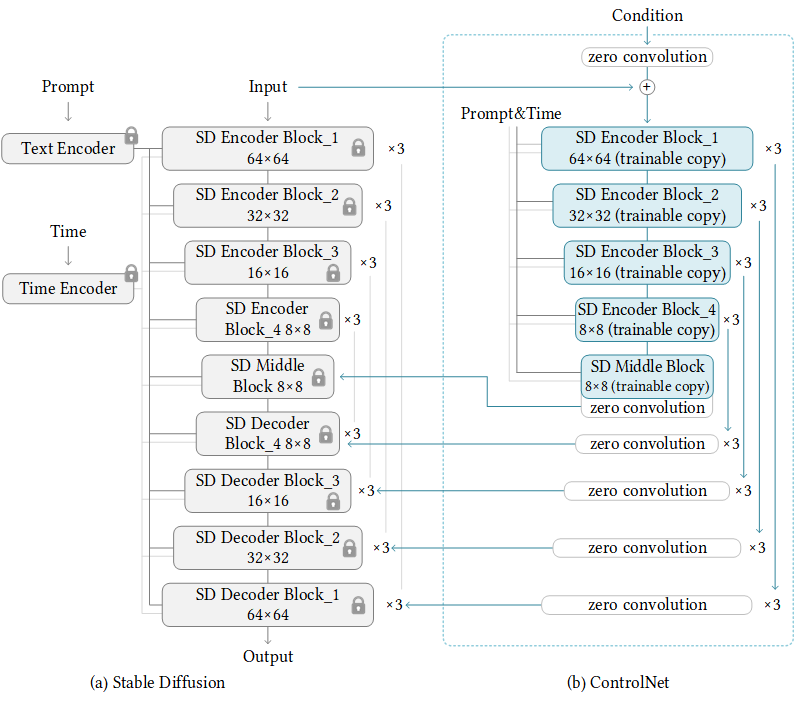
sd + controlnet#
The input is simultaneously passed through the SD blocks, represented on the left, while simultaneously being processed by the ControlNet blocks on the right. This process is almost the same during encoding. When denoising the image, at each step the SD decoder blocks will receive control adjustments from the parallel processing path from ControlNet.
In the end, we are left with a very similar image synthesis pipeline with an additional control added for the shape of the output features in the final image.
Low-Rank Adaptation of Large Language Models (LoRA)#
Low-Rank Adaptation of Large Language Models (LoRA) is a training method that accelerates the training of large models while consuming less memory. It adds pairs of rank-decomposition weight matrices (called update matrices) to existing weights, and only trains those newly added weights. This has a couple of advantages:
LoRA makes fine-tuning more efficient by drastically reducing the number of trainable parameters.
The original pre-trained weights are kept frozen, which means you can have multiple lightweight and portable LoRA models for various downstream tasks built on top of them.
LoRA is orthogonal to many other parameter-efficient methods and can be combined with many of them.
Performance of models fine-tuned using LoRA is comparable to the performance of fully fine-tuned models.
LoRA does not add any inference latency because adapter weights can be merged with the base model.
In principle, LoRA can be applied to any subset of weight matrices in a neural network to reduce the number of trainable parameters. However, for simplicity and further parameter efficiency, in Transformer models LoRA is typically applied to attention blocks only. The resulting number of trainable parameters in a LoRA model depends on the size of the low-rank update matrices, which is determined mainly by the rank r and the shape of the original weight matrix. More details about LoRA can be found in HuggingFace conceptual guide, Diffusers documentation and blog post.
Prerequisites#
Install required packages
%pip install -q "torch" einops torchvision transformers "diffusers>=0.24.0" timm "peft>=0.6.2" accelerate --extra-index-url https://download.pytorch.org/whl/cpu
%pip install -q "openvino>=2023.2.0" pillow "gradio>=4.19" "datasets>=2.14.6" "nncf>=2.7.0" "matplotlib>=3.4"
%pip install -q -no-deps "controlnet-aux>=0.0.6"
%pip install -q scipy opencv-python filelock scikit-image
Prepare PyTorch models
from pathlib import Path
controlnet_id = "lllyasviel/control_v11p_sd15_normalbae"
adapter_id = "latent-consistency/lcm-lora-sdv1-5"
stable_diffusion_id = "botp/stable-diffusion-v1-5"
TEXT_ENCODER_OV_PATH = Path("model/text_encoder.xml")
UNET_OV_PATH = Path("model/unet_controlnet.xml")
CONTROLNET_OV_PATH = Path("model/controlnet-normalbae.xml")
VAE_DECODER_OV_PATH = Path("model/vae_decoder.xml")
TOKENIZER_PATH = Path("model/tokenizer")
SCHEDULER_PATH = Path("model/scheduler")
skip_models = TEXT_ENCODER_OV_PATH.exists() and UNET_OV_PATH.exists() and CONTROLNET_OV_PATH.exists() and VAE_DECODER_OV_PATH.exists()
Load Original Diffusers pipeline and prepare models for conversion#
For working with Stable Diffusion and ControlNet models, we will use
Hugging Face Diffusers
library. To experiment with ControlNet, Diffusers exposes the
StableDiffusionControlNetPipeline
similar to the other Diffusers
pipelines.
Central to the StableDiffusionControlNetPipeline is the
controlnet argument which enables providing a particularly trained
ControlNetModel
instance while keeping the pre-trained diffusion model weights the same.
The code below demonstrates how to create
StableDiffusionControlNetPipeline. The process consists of the
following steps: 1. Create ControlNetModel for passing to pipeline
using from_pretrained method. 2. Create
StableDiffusionControlNetPipeline using Stable Diffusion and
ControlNet model 3. Load LoRA weights to the pipeline using
load_lora_weights method.
from diffusers import StableDiffusionControlNetPipeline, ControlNetModel
import gc
def load_original_pytorch_pipeline_components(controlnet_id: str, stable_diffusion_id: str, adapter_id: str):
"""
Helper function for loading Stable Diffusion ControlNet pipeline and applying LCM LoRA
Parameters:
controlnet_id: model id from HuggingFace hub or local path for loading ControlNet model
stable_diffusion_id: model id from HuggingFace hub or local path for loading Stable Diffusion model
adapter_id: LCM LoRA id from HuggingFace hub or local path
Returns:
controlnet: ControlNet model
text_encoder: Stable Diffusion Text Encoder
unet: Stable Diffusion U-Net
vae: Stable Diffusion Variational Autoencoder (VAE)
"""
# load controlnet model
controlnet = ControlNetModel.from_pretrained(controlnet_id)
# load stable diffusion pipeline
pipe = StableDiffusionControlNetPipeline.from_pretrained(stable_diffusion_id, controlnet=controlnet)
# load LCM LoRA weights
pipe.load_lora_weights(adapter_id)
# fuse LoRA weights with UNet
pipe.fuse_lora()
text_encoder = pipe.text_encoder
text_encoder.eval()
unet = pipe.unet
unet.eval()
vae = pipe.vae
vae.eval()
del pipe
gc.collect()
return controlnet, text_encoder, unet, vae
controlnet, text_encoder, unet, vae = None, None, None, None
if not skip_models:
controlnet, text_encoder, unet, vae = load_original_pytorch_pipeline_components(controlnet_id, stable_diffusion_id, adapter_id)
Condition Image#
The process of extracting specific information from the input image is called an annotation. ControlNet comes pre-packaged with compatibility with several annotators-models that help it to identify the shape/form of the target in the image:
Canny Edge Detection
M-LSD Lines
HED Boundary
Scribbles
Normal Map
Human Pose Estimation
Semantic Segmentation
Depth Estimation
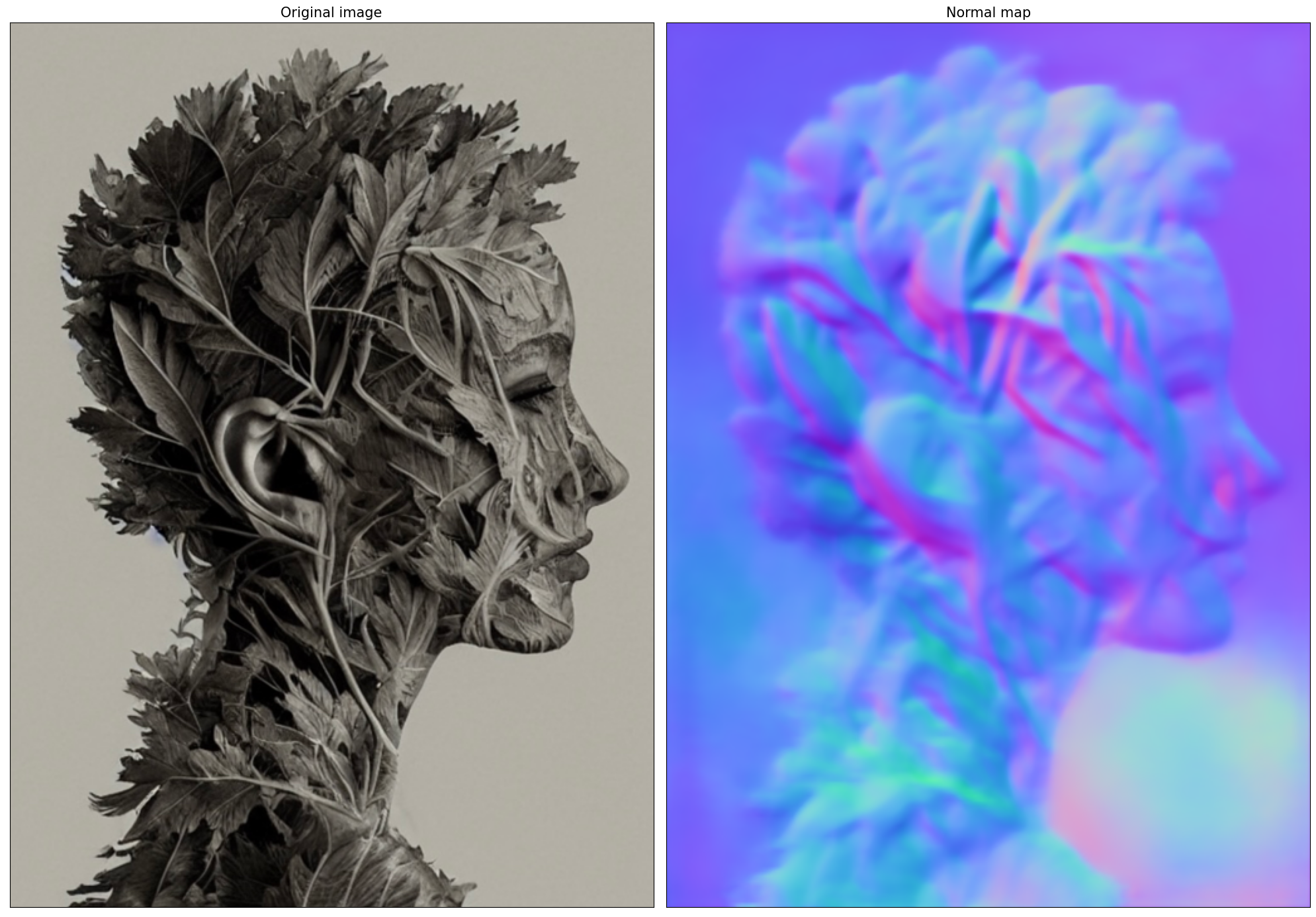
In this tutorial we will use Normal Mapping for controlling diffusion process. For this case, ControlNet condition image is an image with surface normal information, usually represented as a color-coded image.
from controlnet_aux import NormalBaeDetector
from diffusers.utils import load_image
import requests
import matplotlib.pyplot as plt
from PIL import Image
import numpy as np
if not Path("example.png").exists():
example_image_url = "https://huggingface.co/lllyasviel/control_v11p_sd15_normalbae/resolve/main/images/input.png"
r = requests.get(example_image_url)
with open("example.png", "wb") as f:
f.write(r.content)
processor = NormalBaeDetector.from_pretrained("lllyasviel/Annotators")
image = load_image("example.png")
control_image = processor(image)
def visualize_results(
orig_img: Image.Image,
normal_img: Image.Image,
result_img: Image.Image = None,
save_fig: bool = False,
):
"""
Helper function for results visualization
Parameters:
orig_img (Image.Image): original image
normal_img (Image.Image): image with bwith surface normal information
result_img (Image.Image, optional, default None): generated image
safe_fig (bool, optional, default False): allow saving visualization result on disk
Returns:
fig (matplotlib.pyplot.Figure): matplotlib generated figure contains drawing result
"""
orig_title = "Original image"
control_title = "Normal map"
orig_img = orig_img.resize(normal_img.size if result_img is None else result_img.size)
im_w, im_h = orig_img.size
is_horizontal = im_h <= im_w
figsize = (20, 20)
num_images = 3 if result_img is not None else 2
fig, axs = plt.subplots(
num_images if is_horizontal else 1,
1 if is_horizontal else num_images,
figsize=figsize,
sharex="all",
sharey="all",
)
fig.patch.set_facecolor("white")
list_axes = list(axs.flat)
for a in list_axes:
a.set_xticklabels([])
a.set_yticklabels([])
a.get_xaxis().set_visible(False)
a.get_yaxis().set_visible(False)
a.grid(False)
list_axes[0].imshow(np.array(orig_img))
list_axes[1].imshow(np.array(normal_img))
list_axes[0].set_title(orig_title, fontsize=15)
list_axes[1].set_title(control_title, fontsize=15)
if result_img is not None:
list_axes[2].imshow(np.array(result_img))
list_axes[2].set_title("Result", fontsize=15)
fig.subplots_adjust(wspace=0.01 if is_horizontal else 0.00, hspace=0.01 if is_horizontal else 0.1)
fig.tight_layout()
if save_fig:
fig.savefig("result.png", bbox_inches="tight")
return fig
fig = visualize_results(image, control_image)
Loading base model ()...Done.
Removing last two layers (global_pool & classifier).
Convert models to OpenVINO Intermediate representation (IR) format#
Starting from 2023.0 release, OpenVINO supports PyTorch models
conversion directly. We need to provide a model object, input data for
model tracing to ov.convert_model function to obtain OpenVINO
ov.Model object instance. Model can be saved on disk for next
deployment using ov.save_model function.
The pipeline consists of five important parts:
ControlNet for conditioning by image annotation.
Text Encoder for creation condition to generate an image from a text prompt.
Unet for step-by-step denoising latent image representation.
Autoencoder (VAE) for decoding latent space to image.
Let us convert each part:
ControlNet conversion#
The ControlNet model accepts the same inputs like UNet in Stable Diffusion pipeline and additional condition sample - skeleton key points map predicted by pose estimator:
sample- latent image sample from the previous step, generation process has not been started yet, so we will use random noise,timestep- current scheduler step,encoder_hidden_state- hidden state of text encoder,controlnet_cond- condition input annotation.
The output of the model is attention hidden states from down and middle blocks, which serves additional context for the UNet model.
import torch
import openvino as ov
from functools import partial
def cleanup_torchscript_cache():
"""
Helper for removing cached model representation
"""
torch._C._jit_clear_class_registry()
torch.jit._recursive.concrete_type_store = torch.jit._recursive.ConcreteTypeStore()
torch.jit._state._clear_class_state()
def flattenize_inputs(inputs):
"""
Helper function for resolve nested input structure (e.g. lists or tuples of tensors)
"""
flatten_inputs = []
for input_data in inputs:
if input_data is None:
continue
if isinstance(input_data, (list, tuple)):
flatten_inputs.extend(flattenize_inputs(input_data))
else:
flatten_inputs.append(input_data)
return flatten_inputs
dtype_mapping = {
torch.float32: ov.Type.f32,
torch.float64: ov.Type.f64,
torch.int32: ov.Type.i32,
torch.int64: ov.Type.i64,
}
def prepare_input_info(input_dict):
"""
Helper function for preparing input info (shapes and data types) for conversion based on example inputs
"""
flatten_inputs = flattenize_inputs(inputs.values())
input_info = []
for input_data in flatten_inputs:
updated_shape = list(input_data.shape)
if updated_shape:
updated_shape[0] = -1
if input_data.ndim == 4:
updated_shape[2] = -1
updated_shape[3] = -1
input_info.append((dtype_mapping[input_data.dtype], updated_shape))
return input_info
inputs = {
"sample": torch.randn((1, 4, 64, 64)),
"timestep": torch.tensor(1, dtype=torch.float32),
"encoder_hidden_states": torch.randn((1, 77, 768)),
"controlnet_cond": torch.randn((1, 3, 512, 512)),
}
# Prepare conditional inputs for U-Net
if not UNET_OV_PATH.exists():
controlnet.eval()
with torch.no_grad():
down_block_res_samples, mid_block_res_sample = controlnet(**inputs, return_dict=False)
if not CONTROLNET_OV_PATH.exists():
input_info = prepare_input_info(inputs)
with torch.no_grad():
controlnet.forward = partial(controlnet.forward, return_dict=False)
ov_model = ov.convert_model(controlnet, example_input=inputs, input=input_info)
ov.save_model(ov_model, CONTROLNET_OV_PATH)
del ov_model
cleanup_torchscript_cache()
print("ControlNet successfully converted to IR")
else:
print(f"ControlNet will be loaded from {CONTROLNET_OV_PATH}")
del controlnet
gc.collect()
ControlNet will be loaded from model/controlnet-normalbae.xml
9
U-Net#
The process of U-Net model conversion remains the same, like for original Stable Diffusion model, but with respect to the new inputs generated by ControlNet.
from typing import Tuple
class UnetWrapper(torch.nn.Module):
def __init__(
self,
unet,
sample_dtype=torch.float32,
timestep_dtype=torch.int64,
encoder_hidden_states=torch.float32,
down_block_additional_residuals=torch.float32,
mid_block_additional_residual=torch.float32,
):
super().__init__()
self.unet = unet
self.sample_dtype = sample_dtype
self.timestep_dtype = timestep_dtype
self.encoder_hidden_states_dtype = encoder_hidden_states
self.down_block_additional_residuals_dtype = down_block_additional_residuals
self.mid_block_additional_residual_dtype = mid_block_additional_residual
def forward(
self,
sample: torch.Tensor,
timestep: torch.Tensor,
encoder_hidden_states: torch.Tensor,
down_block_additional_residuals: Tuple[torch.Tensor],
mid_block_additional_residual: torch.Tensor,
):
sample.to(self.sample_dtype)
timestep.to(self.timestep_dtype)
encoder_hidden_states.to(self.encoder_hidden_states_dtype)
down_block_additional_residuals = [res.to(self.down_block_additional_residuals_dtype) for res in down_block_additional_residuals]
mid_block_additional_residual.to(self.mid_block_additional_residual_dtype)
return self.unet(
sample,
timestep,
encoder_hidden_states,
down_block_additional_residuals=down_block_additional_residuals,
mid_block_additional_residual=mid_block_additional_residual,
)
if not UNET_OV_PATH.exists():
inputs.pop("controlnet_cond", None)
inputs["down_block_additional_residuals"] = down_block_res_samples
inputs["mid_block_additional_residual"] = mid_block_res_sample
input_info = prepare_input_info(inputs)
wrapped_unet = UnetWrapper(unet)
wrapped_unet.eval()
with torch.no_grad():
ov_model = ov.convert_model(wrapped_unet, example_input=inputs)
for (input_dtype, input_shape), input_tensor in zip(input_info, ov_model.inputs):
input_tensor.get_node().set_partial_shape(ov.PartialShape(input_shape))
input_tensor.get_node().set_element_type(input_dtype)
ov_model.validate_nodes_and_infer_types()
ov.save_model(ov_model, UNET_OV_PATH)
del ov_model
cleanup_torchscript_cache()
del wrapped_unet
del unet
gc.collect()
print("Unet successfully converted to IR")
else:
del unet
print(f"Unet will be loaded from {UNET_OV_PATH}")
gc.collect()
Unet will be loaded from model/unet_controlnet.xml
0
Text Encoder#
The text-encoder is responsible for transforming the input prompt, for example, “a photo of an astronaut riding a horse” into an embedding space that can be understood by the U-Net. It is usually a simple transformer-based encoder that maps a sequence of input tokens to a sequence of latent text embeddings.
The input of the text encoder is tensor input_ids, which contains
indexes of tokens from text processed by the tokenizer and padded to the
maximum length accepted by the model. Model outputs are two tensors:
last_hidden_state - hidden state from the last MultiHeadAttention
layer in the model and pooler_out - pooled output for whole model
hidden states.
def convert_encoder(text_encoder: torch.nn.Module, ir_path: Path):
"""
Convert Text Encoder model to OpenVINO IR.
Function accepts text encoder model, prepares example inputs for conversion, and convert it to OpenVINO Model
Parameters:
text_encoder (torch.nn.Module): text_encoder model
ir_path (Path): File for storing model
Returns:
None
"""
if not ir_path.exists():
input_ids = torch.ones((1, 77), dtype=torch.long)
# switch model to inference mode
text_encoder.eval()
# disable gradients calculation for reducing memory consumption
with torch.no_grad():
ov_model = ov.convert_model(
text_encoder, # model instance
example_input=input_ids, # inputs for model tracing
input=([1, 77],),
)
ov.save_model(ov_model, ir_path)
del ov_model
cleanup_torchscript_cache()
print("Text Encoder successfully converted to IR")
if not TEXT_ENCODER_OV_PATH.exists():
convert_encoder(text_encoder, TEXT_ENCODER_OV_PATH)
else:
print(f"Text encoder will be loaded from {TEXT_ENCODER_OV_PATH}")
del text_encoder
gc.collect()
Text encoder will be loaded from model/text_encoder.xml
0
VAE Decoder conversion#
The VAE model has two parts, an encoder, and a decoder. The encoder is used to convert the image into a low-dimensional latent representation, which will serve as the input to the U-Net model. The decoder, conversely, transforms the latent representation back into an image.
During latent diffusion training, the encoder is used to get the latent representations (latents) of the images for the forward diffusion process, which applies more and more noise at each step. During inference, the denoised latents generated by the reverse diffusion process are converted back into images using the VAE decoder. During inference, we will see that we only need the VAE decoder. You can find instructions on how to convert the encoder part in a stable diffusion notebook.
def convert_vae_decoder(vae: torch.nn.Module, ir_path: Path):
"""
Convert VAE model to IR format.
Function accepts pipeline, creates wrapper class for export only necessary for inference part,
prepares example inputs for convert,
Parameters:
vae (torch.nn.Module): VAE model
ir_path (Path): File for storing model
Returns:
None
"""
class VAEDecoderWrapper(torch.nn.Module):
def __init__(self, vae):
super().__init__()
self.vae = vae
def forward(self, latents):
return self.vae.decode(latents)
if not ir_path.exists():
vae_decoder = VAEDecoderWrapper(vae)
latents = torch.zeros((1, 4, 64, 64))
vae_decoder.eval()
with torch.no_grad():
ov_model = ov.convert_model(vae_decoder, example_input=latents, input=[-1, 4, -1, -1])
ov.save_model(ov_model, ir_path)
del ov_model
cleanup_torchscript_cache()
print("VAE decoder successfully converted to IR")
if not VAE_DECODER_OV_PATH.exists():
convert_vae_decoder(vae, VAE_DECODER_OV_PATH)
else:
print(f"VAE decoder will be loaded from {VAE_DECODER_OV_PATH}")
del vae
VAE decoder will be loaded from model/vae_decoder.xml
Prepare Inference pipeline#
We already deeply discussed how the ControlNet-guided pipeline works on
example pose-controlled generation in controlnet
notebook. In our current example,
the pipeline remains without changes. Similarly to Diffusers
StableDiffusionControlNetPipeline, we define our own
OVControlNetStableDiffusionPipeline inference pipeline based on
OpenVINO.
from diffusers import DiffusionPipeline
from transformers import CLIPTokenizer
from typing import Union, List, Optional, Tuple
import cv2
def scale_fit_to_window(dst_width: int, dst_height: int, image_width: int, image_height: int):
"""
Preprocessing helper function for calculating image size for resize with peserving original aspect ratio
and fitting image to specific window size
Parameters:
dst_width (int): destination window width
dst_height (int): destination window height
image_width (int): source image width
image_height (int): source image height
Returns:
result_width (int): calculated width for resize
result_height (int): calculated height for resize
"""
im_scale = min(dst_height / image_height, dst_width / image_width)
return int(im_scale * image_width), int(im_scale * image_height)
def preprocess(image: Image.Image, dst_height: int = 512, dst_width: int = 512):
"""
Image preprocessing function. Takes image in PIL.Image format, resizes it to keep aspect ration and fits to model input window 512x512,
then converts it to np.ndarray and adds padding with zeros on right or bottom side of image (depends from aspect ratio), after that
converts data to float32 data type and change range of values from [0, 255] to [-1, 1], finally, converts data layout from planar NHWC to NCHW.
The function returns preprocessed input tensor and padding size, which can be used in postprocessing.
Parameters:
image (Image.Image): input image
dst_width: destination image width
dst_height: destination image height
Returns:
image (np.ndarray): preprocessed image tensor
pad (Tuple[int]): pading size for each dimension for restoring image size in postprocessing
"""
src_width, src_height = image.size
res_width, res_height = scale_fit_to_window(dst_width, dst_height, src_width, src_height)
image = np.array(image.resize((res_width, res_height), resample=Image.Resampling.LANCZOS))[None, :]
pad_width = dst_width - res_width
pad_height = dst_height - res_height
pad = ((0, 0), (0, pad_height), (0, pad_width), (0, 0))
image = np.pad(image, pad, mode="constant")
image = image.astype(np.float32) / 255.0
image = image.transpose(0, 3, 1, 2)
return image, pad
def randn_tensor(
shape: Union[Tuple, List],
dtype: Optional[torch.dtype] = torch.float32,
):
"""
Helper function for generation random values tensor with given shape and data type
Parameters:
shape (Union[Tuple, List]): shape for filling random values
dtype (torch.dtype, *optiona*, torch.float32): data type for result
Returns:
latents (np.ndarray): tensor with random values with given data type and shape (usually represents noise in latent space)
"""
latents = torch.randn(shape, dtype=dtype)
return latents.numpy()
class OVControlNetStableDiffusionPipeline(DiffusionPipeline):
"""
OpenVINO inference pipeline for Stable Diffusion with ControlNet guidence
"""
def __init__(
self,
tokenizer: CLIPTokenizer,
scheduler,
core: ov.Core,
controlnet: ov.Model,
text_encoder: ov.Model,
unet: ov.Model,
vae_decoder: ov.Model,
device: str = "AUTO",
):
super().__init__()
self.tokenizer = tokenizer
self.vae_scale_factor = 8
self.scheduler = scheduler
self.load_models(core, device, controlnet, text_encoder, unet, vae_decoder)
def load_models(
self,
core: ov.Core,
device: str,
controlnet: ov.Model,
text_encoder: ov.Model,
unet: ov.Model,
vae_decoder: ov.Model,
):
"""
Function for loading models on device using OpenVINO
Parameters:
core (Core): OpenVINO runtime Core class instance
device (str): inference device
controlnet (Model): OpenVINO Model object represents ControlNet
text_encoder (Model): OpenVINO Model object represents text encoder
unet (Model): OpenVINO Model object represents UNet
vae_decoder (Model): OpenVINO Model object represents vae decoder
Returns
None
"""
self.text_encoder = core.compile_model(text_encoder, device)
self.register_to_config(controlnet=core.compile_model(controlnet, device))
self.register_to_config(unet=core.compile_model(unet, device))
ov_config = {"INFERENCE_PRECISION_HINT": "f32"} if device != "CPU" else {}
self.vae_decoder = core.compile_model(vae_decoder, device, ov_config)
def __call__(
self,
prompt: Union[str, List[str]],
image: Image.Image,
num_inference_steps: int = 4,
height: int = 512,
width: int = 512,
negative_prompt: Union[str, List[str]] = None,
guidance_scale: float = 0.5,
controlnet_conditioning_scale: float = 1.0,
latents: Optional[np.array] = None,
output_type: Optional[str] = "pil",
):
"""
Function invoked when calling the pipeline for generation.
Parameters:
prompt (`str` or `List[str]`):
The prompt or prompts to guide the image generation.
image (`Image.Image`):
`Image`, or tensor representing an image batch which will be repainted according to `prompt`.
num_inference_steps (`int`, *optional*, defaults to 100):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
height (int, *optional*, defaults to 512): generated image height
width (int, *optional*, defaults to 512): generated image width
negative_prompt (`str` or `List[str]`):
negative prompt or prompts for generation
guidance_scale (`float`, *optional*, defaults to 0.5):
Guidance scale as defined in [Classifier-Free Diffusion Guidance](https://arxiv.org/abs/2207.12598).
`guidance_scale` is defined as `w` of equation 2. of [Imagen
Paper](https://arxiv.org/pdf/2205.11487.pdf). Guidance scale is enabled by setting `guidance_scale >
1`. Higher guidance scale encourages to generate images that are closely linked to the text `prompt`,
usually at the expense of lower image quality. This pipeline requires a value of at least `1`.
latents (`np.ndarray`, *optional*):
Pre-generated noisy latents, sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor will ge generated by sampling using the supplied random `generator`.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generate image. Choose between
[PIL](https://pillow.readthedocs.io/en/stable/): `Image.Image` or `np.array`.
Returns:
image ([List[Union[np.ndarray, Image.Image]]): generaited images
"""
# 1. Define call parameters
batch_size = 1 if isinstance(prompt, str) else len(prompt)
if guidance_scale < 1 and negative_prompt:
guidance_scale += 1
# here `guidance_scale` is defined analog to the guidance weight `w` of equation (2)
# of the Imagen paper: https://arxiv.org/pdf/2205.11487.pdf . `guidance_scale = 1`
# corresponds to doing no classifier free guidance.
do_classifier_free_guidance = guidance_scale > 1.0
# 2. Encode input prompt
text_embeddings = self._encode_prompt(
prompt,
do_classifier_free_guidance=do_classifier_free_guidance,
negative_prompt=negative_prompt,
)
# 3. Preprocess image
orig_width, orig_height = image.size
image, pad = preprocess(image, height, width)
if do_classifier_free_guidance:
image = np.concatenate(([image] * 2))
# 4. set timesteps
self.scheduler.set_timesteps(num_inference_steps)
timesteps = self.scheduler.timesteps
# 5. Prepare latent variables
num_channels_latents = 4
latents = self.prepare_latents(
batch_size,
num_channels_latents,
height,
width,
latents=latents,
)
# 6. Denoising loop
with self.progress_bar(total=num_inference_steps) as progress_bar:
for i, t in enumerate(timesteps):
# Expand the latents if we are doing classifier free guidance.
# The latents are expanded 3 times because for pix2pix the guidance\
# is applied for both the text and the input image.
latent_model_input = np.concatenate([latents] * 2) if do_classifier_free_guidance else latents
latent_model_input = self.scheduler.scale_model_input(latent_model_input, t)
result = self.controlnet(
[latent_model_input, t, text_embeddings, image],
share_inputs=True,
share_outputs=True,
)
down_and_mid_blok_samples = [sample * controlnet_conditioning_scale for _, sample in result.items()]
# predict the noise residual
noise_pred = self.unet(
[
latent_model_input,
t,
text_embeddings,
*down_and_mid_blok_samples,
],
share_inputs=True,
share_outputs=True,
)[0]
# perform guidance
if do_classifier_free_guidance:
noise_pred_uncond, noise_pred_text = noise_pred[0], noise_pred[1]
noise_pred = noise_pred_uncond + guidance_scale * (noise_pred_text - noise_pred_uncond)
# compute the previous noisy sample x_t -> x_t-1
latents = self.scheduler.step(torch.from_numpy(noise_pred), t, torch.from_numpy(latents)).prev_sample.numpy()
progress_bar.update()
# 7. Post-processing
image = self.decode_latents(latents, pad)
# 8. Convert to PIL
if output_type == "pil":
image = self.numpy_to_pil(image)
image = [img.resize((orig_width, orig_height), Image.Resampling.LANCZOS) for img in image]
else:
image = [cv2.resize(img, (orig_width, orig_width)) for img in image]
return image
def _encode_prompt(
self,
prompt: Union[str, List[str]],
num_images_per_prompt: int = 1,
do_classifier_free_guidance: bool = True,
negative_prompt: Union[str, List[str]] = None,
):
"""
Encodes the prompt into text encoder hidden states.
Parameters:
prompt (str or list(str)): prompt to be encoded
num_images_per_prompt (int): number of images that should be generated per prompt
do_classifier_free_guidance (bool): whether to use classifier free guidance or not
negative_prompt (str or list(str)): negative prompt to be encoded
Returns:
text_embeddings (np.ndarray): text encoder hidden states
"""
batch_size = len(prompt) if isinstance(prompt, list) else 1
# tokenize input prompts
text_inputs = self.tokenizer(
prompt,
padding="max_length",
max_length=self.tokenizer.model_max_length,
truncation=True,
return_tensors="np",
)
text_input_ids = text_inputs.input_ids
text_embeddings = self.text_encoder(text_input_ids, share_inputs=True, share_outputs=True)[0]
# duplicate text embeddings for each generation per prompt
if num_images_per_prompt != 1:
bs_embed, seq_len, _ = text_embeddings.shape
text_embeddings = np.tile(text_embeddings, (1, num_images_per_prompt, 1))
text_embeddings = np.reshape(text_embeddings, (bs_embed * num_images_per_prompt, seq_len, -1))
# get unconditional embeddings for classifier free guidance
if do_classifier_free_guidance:
uncond_tokens: List[str]
max_length = text_input_ids.shape[-1]
if negative_prompt is None:
uncond_tokens = [""] * batch_size
elif isinstance(negative_prompt, str):
uncond_tokens = [negative_prompt]
else:
uncond_tokens = negative_prompt
uncond_input = self.tokenizer(
uncond_tokens,
padding="max_length",
max_length=max_length,
truncation=True,
return_tensors="np",
)
uncond_embeddings = self.text_encoder(uncond_input.input_ids, share_inputs=True, share_outputs=True)[0]
# duplicate unconditional embeddings for each generation per prompt, using mps friendly method
seq_len = uncond_embeddings.shape[1]
uncond_embeddings = np.tile(uncond_embeddings, (1, num_images_per_prompt, 1))
uncond_embeddings = np.reshape(uncond_embeddings, (batch_size * num_images_per_prompt, seq_len, -1))
# For classifier free guidance, we need to do two forward passes.
# Here we concatenate the unconditional and text embeddings into a single batch
# to avoid doing two forward passes
text_embeddings = np.concatenate([uncond_embeddings, text_embeddings])
return text_embeddings
def prepare_latents(
self,
batch_size: int,
num_channels_latents: int,
height: int,
width: int,
dtype: np.dtype = torch.float32,
latents: np.ndarray = None,
):
"""
Preparing noise to image generation. If initial latents are not provided, they will be generated randomly,
then prepared latents scaled by the standard deviation required by the scheduler
Parameters:
batch_size (int): input batch size
num_channels_latents (int): number of channels for noise generation
height (int): image height
width (int): image width
dtype (np.dtype, *optional*, np.float32): dtype for latents generation
latents (np.ndarray, *optional*, None): initial latent noise tensor, if not provided will be generated
Returns:
latents (np.ndarray): scaled initial noise for diffusion
"""
shape = (
batch_size,
num_channels_latents,
height // self.vae_scale_factor,
width // self.vae_scale_factor,
)
if latents is None:
latents = randn_tensor(shape, dtype=dtype)
else:
latents = latents
# scale the initial noise by the standard deviation required by the scheduler
latents = latents * self.scheduler.init_noise_sigma
return latents
def decode_latents(self, latents: np.array, pad: Tuple[int]):
"""
Decode predicted image from latent space using VAE Decoder and unpad image result
Parameters:
latents (np.ndarray): image encoded in diffusion latent space
pad (Tuple[int]): each side padding sizes obtained on preprocessing step
Returns:
image: decoded by VAE decoder image
"""
latents = 1 / 0.18215 * latents
image = self.vae_decoder(latents)[0]
(_, end_h), (_, end_w) = pad[1:3]
h, w = image.shape[2:]
unpad_h = h - end_h
unpad_w = w - end_w
image = image[:, :, :unpad_h, :unpad_w]
image = np.clip(image / 2 + 0.5, 0, 1)
image = np.transpose(image, (0, 2, 3, 1))
return image
Prepare tokenizer and LCMScheduler#
Tokenizer and scheduler are also important parts of the diffusion pipeline. The tokenizer is responsible for preprocessing user-provided prompts into token ids that then used by Text Encoder.
The scheduler takes a model’s output (the sample which the diffusion process is iterating on) and a timestep to return a denoised sample. The timestep is important because it dictates where in the diffusion process the step is; data is generated by iterating forward n timesteps and inference occurs by propagating backward through the timesteps. There are many schedulers implemented inside the diffusers library, LCM pipeline required changing the original pipeline scheduler with LCMScheduler.
from diffusers import LCMScheduler
from transformers import AutoTokenizer
if not TOKENIZER_PATH.exists():
tokenizer = AutoTokenizer.from_pretrained(stable_diffusion_id, subfolder="tokenizer")
tokenizer.save_pretrained(TOKENIZER_PATH)
else:
tokenizer = AutoTokenizer.from_pretrained(TOKENIZER_PATH)
if not SCHEDULER_PATH.exists():
scheduler = LCMScheduler.from_pretrained(stable_diffusion_id, subfolder="scheduler")
scheduler.save_pretrained(SCHEDULER_PATH)
else:
scheduler = LCMScheduler.from_config(SCHEDULER_PATH)
Select inference device for Stable Diffusion pipeline#
select device from dropdown list for running inference using OpenVINO
import requests
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/notebook_utils.py",
)
open("notebook_utils.py", "w").write(r.text)
from notebook_utils import device_widget
device = device_widget()
device
# Read more about telemetry collection at https://github.com/openvinotoolkit/openvino_notebooks?tab=readme-ov-file#-telemetry
from notebook_utils import collect_telemetry
collect_telemetry("lcm-lora-controlnet.ipynb")
Dropdown(description='Device:', options=('CPU', 'GPU.0', 'GPU.1', 'GPU.2', 'AUTO'), value='CPU')
core = ov.Core()
ov_pipe = OVControlNetStableDiffusionPipeline(
tokenizer,
scheduler,
core,
CONTROLNET_OV_PATH,
TEXT_ENCODER_OV_PATH,
UNET_OV_PATH,
VAE_DECODER_OV_PATH,
device=device.value,
)
Running Text-to-Image Generation with ControlNet Conditioning and OpenVINO#
Now, we are ready to start generation. For improving the generation
process, we also introduce an opportunity to provide a
negative prompt. Technically, positive prompt steers the diffusion
toward the images associated with it, while negative prompt steers the
diffusion away from it. More explanation of how it works can be found in
this
article.
We can keep this field empty if we want to generate image without
negative prompting.
Classifier-free guidance (CFG) or guidance scale is a parameter that controls how much the image generation process follows the text prompt. The higher the value, the more the image sticks to a given text input. But this does not mean that the value should always be set to maximum, as more guidance means less diversity and quality. According to experiments, the optimal value of guidance for LCM models is in range between 0 and 2. > Please note, that negative prompt is applicable only when guidance scale > 1.
Let’s see model in action
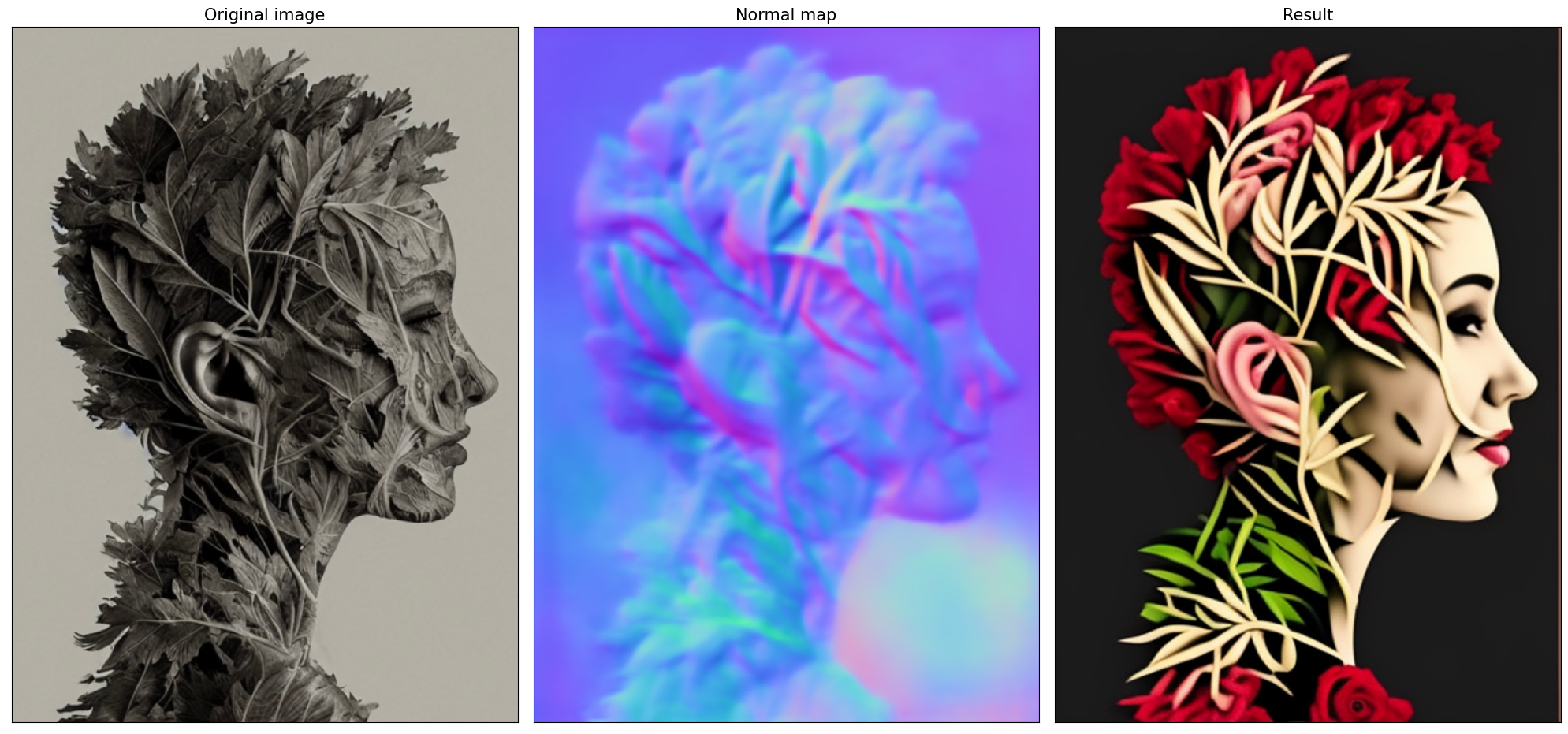
prompt = "A head full of roses"
torch.manual_seed(4257)
result = ov_pipe(prompt, control_image, 4)
result[0]
0%| | 0/4 [00:00<?, ?it/s]
/home/ltalamanova/omz/lib/python3.8/site-packages/diffusers/configuration_utils.py:135: FutureWarning: Accessing config attribute controlnet directly via 'OVControlNetStableDiffusionPipeline' object attribute is deprecated. Please access 'controlnet' over 'OVControlNetStableDiffusionPipeline's config object instead, e.g. 'scheduler.config.controlnet'.
deprecate("direct config name access", "1.0.0", deprecation_message, standard_warn=False)
/home/ltalamanova/omz/lib/python3.8/site-packages/diffusers/configuration_utils.py:135: FutureWarning: Accessing config attribute unet directly via 'OVControlNetStableDiffusionPipeline' object attribute is deprecated. Please access 'unet' over 'OVControlNetStableDiffusionPipeline's config object instead, e.g. 'scheduler.config.unet'.
deprecate("direct config name access", "1.0.0", deprecation_message, standard_warn=False)

fig = visualize_results(image, control_image, result[0])
Quantization#
NNCF enables
post-training quantization by adding quantization layers into model
graph and then using a subset of the training dataset to initialize the
parameters of these additional quantization layers. Quantized operations
are executed in INT8 instead of FP32/FP16 making model
inference faster.
According to OVControlNetStableDiffusionPipeline structure,
ControlNet and UNet are used in the cycle repeating inference on each
diffusion step, while other parts of pipeline take part only once. That
is why computation cost and speed of ControlNet and UNet become the
critical path in the pipeline. Quantizing the rest of the SD pipeline
does not significantly improve inference performance but can lead to a
substantial degradation of accuracy.
The optimization process contains the following steps:
Create a calibration dataset for quantization.
Run
nncf.quantize()to obtain quantized model.Save the
INT8model usingopenvino.save_model()function.
Please select below whether you would like to run quantization to improve model inference speed.
from notebook_utils import quantization_widget
skip_for_device = "GPU" in device.value
to_quantize = quantization_widget(not skip_for_device)
to_quantize
Let’s load skip magic extension to skip quantization if
to_quantize is not selected
# Fetch `skip_kernel_extension` module
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/skip_kernel_extension.py",
)
open("skip_kernel_extension.py", "w").write(r.text)
int8_pipe = None
%load_ext skip_kernel_extension
Prepare calibration datasets#
We use a portion of fusing/instructpix2pix-1000-samples dataset from Hugging Face as calibration data for ControlNet and UNet.
To collect intermediate model inputs for calibration we should customize
CompiledModel.
%%skip not $to_quantize.value
import datasets
from tqdm.notebook import tqdm
from transformers import set_seed
from typing import Any, Dict, List
set_seed(1)
class CompiledModelDecorator(ov.CompiledModel):
def __init__(self, compiled_model, prob: float):
super().__init__(compiled_model)
self.data_cache = []
self.prob = np.clip(prob, 0, 1)
def __call__(self, *args, **kwargs):
if np.random.rand() >= self.prob:
self.data_cache.append(*args)
return super().__call__(*args, **kwargs)
def collect_calibration_data(pipeline: OVControlNetStableDiffusionPipeline, subset_size: int) -> List[Dict]:
original_unet = pipeline.unet
pipeline.unet = CompiledModelDecorator(original_unet, prob=0.3)
dataset = datasets.load_dataset("fusing/instructpix2pix-1000-samples", split="train", streaming=True).shuffle(seed=42)
pipeline.set_progress_bar_config(disable=True)
# Run inference for data collection
pbar = tqdm(total=subset_size)
diff = 0
control_images = []
for batch in dataset:
prompt = batch["edit_prompt"]
if len(prompt) > tokenizer.model_max_length:
continue
image = batch["input_image"]
control_image = processor(image)
_ = pipeline(prompt, image=control_image, num_inference_steps=4)
collected_subset_size = len(pipeline.unet.data_cache)
control_images.append((min(collected_subset_size, subset_size), control_image))
if collected_subset_size >= subset_size:
pbar.update(subset_size - pbar.n)
break
pbar.update(collected_subset_size - diff)
diff = collected_subset_size
control_calibration_dataset = pipeline.unet.data_cache
pipeline.set_progress_bar_config(disable=False)
pipeline.unet = original_unet
return control_calibration_dataset, control_images
%%skip not $to_quantize.value
CONTROLNET_INT8_OV_PATH = Path("model/controlnet-normalbae_int8.xml")
UNET_INT8_OV_PATH = Path("model/unet_controlnet_int8.xml")
if not (CONTROLNET_INT8_OV_PATH.exists() and UNET_INT8_OV_PATH.exists()):
subset_size = 200
unet_calibration_data, control_images = collect_calibration_data(ov_pipe, subset_size=subset_size)
0%| | 0/200 [00:00<?, ?it/s]
The first three inputs of ControlNet are the same as the inputs of UNet,
the last ControlNet input is a preprocessed control_image.
%%skip not $to_quantize.value
if not CONTROLNET_INT8_OV_PATH.exists():
control_calibration_data = []
prev_idx = 0
for upper_bound, image in control_images:
preprocessed_image, _ = preprocess(image)
for i in range(prev_idx, upper_bound):
control_calibration_data.append(unet_calibration_data[i][:3] + [preprocessed_image])
prev_idx = upper_bound
Run quantization#
Create a quantized model from the pre-trained converted OpenVINO model.
FastBiasCorrection algorithm is disabled due to minimal accuracy
improvement in SD models and increased quantization time.
NOTE: Quantization is time and memory consuming operation. Running quantization code below may take some time.
%%skip not $to_quantize.value
import nncf
if not UNET_INT8_OV_PATH.exists():
unet = core.read_model(UNET_OV_PATH)
quantized_unet = nncf.quantize(
model=unet,
calibration_dataset=nncf.Dataset(unet_calibration_data),
model_type=nncf.ModelType.TRANSFORMER,
advanced_parameters=nncf.AdvancedQuantizationParameters(
disable_bias_correction=True
)
)
ov.save_model(quantized_unet, UNET_INT8_OV_PATH)
%%skip not $to_quantize.value
if not CONTROLNET_INT8_OV_PATH.exists():
controlnet = core.read_model(CONTROLNET_OV_PATH)
quantized_controlnet = nncf.quantize(
model=controlnet,
calibration_dataset=nncf.Dataset(control_calibration_data),
model_type=nncf.ModelType.TRANSFORMER,
advanced_parameters=nncf.AdvancedQuantizationParameters(
disable_bias_correction=True
)
)
ov.save_model(quantized_controlnet, CONTROLNET_INT8_OV_PATH)
Let us check predictions with the quantized ControlNet and UNet using the same input data.
%%skip not $to_quantize.value
from IPython.display import display
int8_pipe = OVControlNetStableDiffusionPipeline(
tokenizer,
scheduler,
core,
CONTROLNET_INT8_OV_PATH,
TEXT_ENCODER_OV_PATH,
UNET_INT8_OV_PATH,
VAE_DECODER_OV_PATH,
device=device.value
)
prompt = "A head full of roses"
torch.manual_seed(4257)
int8_result = int8_pipe(prompt, control_image, 4)
fig = visualize_results(result[0], int8_result[0])
fig.axes[0].set_title('FP16 result', fontsize=15)
fig.axes[1].set_title('INT8 result', fontsize=15)
0%| | 0/4 [00:00<?, ?it/s]

Compare inference time of the FP16 and INT8 models#
To measure the inference performance of the FP16 and INT8
pipelines, we use median inference time on calibration subset.
NOTE: For the most accurate performance estimation, it is recommended to run
benchmark_appin a terminal/command prompt after closing other applications.
%%skip not $to_quantize.value
import time
validation_size = 10
calibration_dataset = datasets.load_dataset("fusing/instructpix2pix-1000-samples", split="train", streaming=True).take(validation_size)
validation_data = []
for batch in calibration_dataset:
prompt = batch["edit_prompt"]
image = batch["input_image"]
control_image = processor(image)
validation_data.append((prompt, control_image))
def calculate_inference_time(pipeline, calibration_dataset):
inference_time = []
pipeline.set_progress_bar_config(disable=True)
for prompt, control_image in calibration_dataset:
start = time.perf_counter()
_ = pipeline(prompt, control_image, num_inference_steps=4)
end = time.perf_counter()
delta = end - start
inference_time.append(delta)
return np.median(inference_time)
%%skip not $to_quantize.value
fp_latency = calculate_inference_time(ov_pipe, validation_data)
int8_latency = calculate_inference_time(int8_pipe, validation_data)
print(f"Performance speed up: {fp_latency / int8_latency:.3f}")
Performance speed up: 1.257
%%skip not $to_quantize.value
fp16_ir_model_size = UNET_OV_PATH.with_suffix(".bin").stat().st_size / 2**20
quantized_model_size = UNET_INT8_OV_PATH.with_suffix(".bin").stat().st_size / 2**20
print(f"FP16 UNet size: {fp16_ir_model_size:.2f} MB")
print(f"INT8 UNet size: {quantized_model_size:.2f} MB")
print(f"UNet compression rate: {fp16_ir_model_size / quantized_model_size:.3f}")
FP16 UNet size: 1639.41 MB
INT8 UNet size: 820.96 MB
UNet compression rate: 1.997
%%skip not $to_quantize.value
fp16_ir_model_size = CONTROLNET_OV_PATH.with_suffix(".bin").stat().st_size / 2**20
quantized_model_size = CONTROLNET_INT8_OV_PATH.with_suffix(".bin").stat().st_size / 2**20
print(f"FP16 ControlNet size: {fp16_ir_model_size:.2f} MB")
print(f"INT8 ControlNet size: {quantized_model_size:.2f} MB")
print(f"ControlNet compression rate: {fp16_ir_model_size / quantized_model_size:.3f}")
FP16 ControlNet size: 689.07 MB
INT8 ControlNet size: 345.12 MB
ControlNet compression rate: 1.997
Interactive Demo#
Now, you can test model on own images. Please, provide image into
Input Image window and prompts for generation and click Run
button. To achieve the best results, you also can select additional
options for generation: Guidance scale, Seed and Steps.
import gradio as gr
MAX_SEED = np.iinfo(np.int32).max
quantized_model_present = int8_pipe is not None
def extract_normal_map(img):
if img is None:
raise gr.Error("Please upload the image or use one from the examples list")
return processor(img)
def generate(img, prompt, negative_prompt, seed, num_steps, guidance_scale):
torch.manual_seed(seed)
control_img = extract_normal_map(img)
result = ov_pipe(
prompt,
control_img,
num_steps,
guidance_scale=guidance_scale,
negative_prompt=negative_prompt,
)[0]
if quantized_model_present:
torch.manual_seed(seed)
int8_result = int8_pipe(
prompt,
control_img,
num_steps,
guidance_scale=guidance_scale,
negative_prompt=negative_prompt,
)[0]
return control_img, result, int8_result
return control_img, result
if not Path("gradio_helper.py").exists():
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/notebooks/latent-consistency-models-image-generation/gradio_helper.py"
)
open("gradio_helper.py", "w").write(r.text)
from gradio_helper import make_demo_lcm_lora
demo = make_demo_lcm_lora(fn=generate, quantized=quantized_model_present)
try:
demo.queue().launch(debug=False)
except Exception:
demo.queue().launch(share=True, debug=False, height=800)
# if you are launching remotely, specify server_name and server_port
# demo.launch(server_name='your server name', server_port='server port in int')
# Read more in the docs: https://gradio.app/docs/
# please uncomment and run this cell for stopping gradio interface
# demo.close()