Object detection and masking from prompts with GroundedSAM (GroundingDINO + SAM) and OpenVINO#
This Jupyter notebook can be launched on-line, opening an interactive environment in a browser window. You can also make a local installation. Choose one of the following options:


In this notebook, we provide the OpenVINO™ optimization for the combination of GroundingDINO + SAM = GroundedSAM on Intel® platforms.
GroundedSAM aims to detect and segment anything with text inputs. GroundingDINO is a language-guided query selection module to enhance object detection using input text. It selects relevant features from image and text inputs and returns predicted boxes with detections. The Segment Anything Model (SAM) produces high quality object masks from input prompts such as points or boxes, and it can be used to generate masks for all objects in an image. We use box predictions from GroundingDINO to mask the original image.
More details about the model can be found in the paper, and the official repository.
image#
Table of contents:
Installation Instructions#
This is a self-contained example that relies solely on its own code.
We recommend running the notebook in a virtual environment. You only need a Jupyter server to start. For details, please refer to Installation Guide.
Clone repositories and install requirements#
%pip install -q "openvino>=2024.0" "torch>=2.1" opencv-python "Pillow>=10.0" "supervision[desktop]>=0.22" transformers yapf pycocotools addict "gradio>=4.19" tqdm timm --extra-index-url https://download.pytorch.org/whl/cpu
WARNING: supervision 0.25.1 does not provide the extra 'desktop'
Note: you may need to restart the kernel to use updated packages.
For faster computation and to limit RAM by default we use
EfficientSAM for segmentation, but if you wish more accurate
segmentation you can select vanilla SAM.
import ipywidgets as widgets
sam_type_widget = widgets.Dropdown(
options=["EfficientSAM", "SAM"],
value="EfficientSAM",
description="Segment Anything type:",
)
sam_type_widget
Dropdown(description='Segment Anything type:', options=('EfficientSAM', 'SAM'), value='EfficientSAM')
use_efficient_sam = sam_type_widget.value == "EfficientSAM"
import requests
from pathlib import Path
if not Path("notebook_utils.py").exists():
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/notebook_utils.py",
)
open("notebook_utils.py", "w").write(r.text)
if not Path("cmd_helper.py").exists():
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/cmd_helper.py",
)
open("cmd_helper.py", "w").write(r.text)
# Read more about telemetry collection at https://github.com/openvinotoolkit/openvino_notebooks?tab=readme-ov-file#-telemetry
from notebook_utils import collect_telemetry
collect_telemetry("grounded-segment-anything.ipynb")
from pathlib import Path
import sys
import os
from cmd_helper import clone_repo
repo_dir = Path("Grounded-Segment-Anything")
ground_dino_dir = Path("GroundingDINO")
efficient_sam_dir = Path("EfficientSAM")
# we use grounding dino from a fork which contains modifications that allow conversion to OpenVINO IR
clone_repo("https://github.com/wenyi5608/GroundingDINO.git")
if use_efficient_sam:
clone_repo("https://github.com/yformer/EfficientSAM.git")
if not use_efficient_sam:
clone_repo("https://github.com/IDEA-Research/Grounded-Segment-Anything.git", add_to_sys_path=False)
sys.path.append(repo_dir / "segment_anything")
import torch
import numpy as np
import supervision as sv
import openvino as ov
from PIL import Image, ImageDraw, ImageFont
from typing import Union, List
import transformers
core = ov.Core()
Download checkpoints and load PyTorch models#
IRS_PATH = Path("openvino_irs")
CKPT_BASE_PATH = Path("checkpoints")
os.makedirs(IRS_PATH, exist_ok=True)
os.makedirs(CKPT_BASE_PATH, exist_ok=True)
PT_DEVICE = "cpu"
ov_dino_name = "openvino_grounding_dino"
ov_sam_name = "openvino_segment_anything"
ground_dino_img_size = (1024, 1280)
# GroundingDINO config and checkpoint
GROUNDING_DINO_CONFIG_PATH = f"{ground_dino_dir}/groundingdino/config/GroundingDINO_SwinT_OGC.py"
GROUNDING_DINO_CHECKPOINT_PATH = CKPT_BASE_PATH / "groundingdino_swint_ogc.pth"
# Segment Anything checkpoint
SAM_CHECKPOINT_PATH = CKPT_BASE_PATH / "sam_vit_h_4b8939.pth"
# Efficient Segment Anything checkpoint
EFFICIENT_SAM_CHECKPOINT_PATH = efficient_sam_dir / "weights/efficient_sam_vitt.pt"
from notebook_utils import download_file, device_widget
if not (CKPT_BASE_PATH / "groundingdino_swint_ogc.pth").exists():
download_file(
"https://github.com/IDEA-Research/GroundingDINO/releases/download/v0.1.0-alpha/groundingdino_swint_ogc.pth",
directory=CKPT_BASE_PATH,
)
if not use_efficient_sam and not (CKPT_BASE_PATH / "sam_vit_h_4b8939.pth").exists():
download_file(
"https://dl.fbaipublicfiles.com/segment_anything/sam_vit_h_4b8939.pth",
directory=CKPT_BASE_PATH,
)
groundingdino_swint_ogc.pth: 0%| | 0.00/662M [00:00<?, ?B/s]
GroundingDINO imports
from groundingdino.models.GroundingDINO.bertwarper import (
generate_masks_with_special_tokens_and_transfer_map,
)
from groundingdino.models import build_model
from groundingdino.util.slconfig import SLConfig
from groundingdino.util.utils import clean_state_dict
from groundingdino.util import get_tokenlizer
from groundingdino.util.utils import get_phrases_from_posmap
from groundingdino.util.inference import Model
2025-02-04 02:34:38.131198: I tensorflow/core/util/port.cc:110] oneDNN custom operations are on. You may see slightly different numerical results due to floating-point round-off errors from different computation orders. To turn them off, set the environment variable TF_ENABLE_ONEDNN_OPTS=0. 2025-02-04 02:34:38.165686: I tensorflow/core/platform/cpu_feature_guard.cc:182] This TensorFlow binary is optimized to use available CPU instructions in performance-critical operations. To enable the following instructions: AVX2 AVX512F AVX512_VNNI FMA, in other operations, rebuild TensorFlow with the appropriate compiler flags. 2025-02-04 02:34:38.716239: W tensorflow/compiler/tf2tensorrt/utils/py_utils.cc:38] TF-TRT Warning: Could not find TensorRT FutureWarning: Importing from timm.models.layers is deprecated, please import via timm.layers UserWarning: Failed to load custom C++ ops. Running on CPU mode Only!
def load_pt_grounding_dino(model_config_path, model_checkpoint_path):
args = SLConfig.fromfile(model_config_path)
# modified config
args.device = PT_DEVICE
args.use_checkpoint = False
args.use_transformer_ckpt = False
model = build_model(args)
checkpoint = torch.load(model_checkpoint_path, map_location=PT_DEVICE)
model.load_state_dict(clean_state_dict(checkpoint["model"]), strict=False)
_ = model.eval()
return (
model,
args.max_text_len,
get_tokenlizer.get_tokenlizer(args.text_encoder_type),
)
# Load GroundingDINO inference model
pt_grounding_dino_model, max_text_len, dino_tokenizer = load_pt_grounding_dino(GROUNDING_DINO_CONFIG_PATH, GROUNDING_DINO_CHECKPOINT_PATH)
UserWarning: torch.meshgrid: in an upcoming release, it will be required to pass the indexing argument. (Triggered internally at ../aten/src/ATen/native/TensorShape.cpp:3609.)
final text_encoder_type: bert-base-uncased
FutureWarning: You are using torch.load with weights_only=False (the current default value), which uses the default pickle module implicitly. It is possible to construct malicious pickle data which will execute arbitrary code during unpickling (See pytorch/pytorch for more details). In a future release, the default value for weights_only will be flipped to True. This limits the functions that could be executed during unpickling. Arbitrary objects will no longer be allowed to be loaded via this mode unless they are explicitly allowlisted by the user via torch.serialization.add_safe_globals. We recommend you start setting weights_only=True for any use case where you don't have full control of the loaded file. Please open an issue on GitHub for any issues related to this experimental feature.
final text_encoder_type: bert-base-uncased
# load SAM model: EfficientSAM or vanilla SAM
if use_efficient_sam:
from efficient_sam.efficient_sam import build_efficient_sam
# Load EfficientSAM
efficient_sam_model = build_efficient_sam(
encoder_patch_embed_dim=192,
encoder_num_heads=3,
checkpoint=EFFICIENT_SAM_CHECKPOINT_PATH,
).eval()
else:
from segment_anything import build_sam, SamPredictor
# Load SAM Model and SAM Predictor
sam = build_sam(checkpoint=SAM_CHECKPOINT_PATH).to(PT_DEVICE)
sam_predictor = SamPredictor(sam)
FutureWarning: You are using torch.load with weights_only=False (the current default value), which uses the default pickle module implicitly. It is possible to construct malicious pickle data which will execute arbitrary code during unpickling (See pytorch/pytorch for more details). In a future release, the default value for weights_only will be flipped to True. This limits the functions that could be executed during unpickling. Arbitrary objects will no longer be allowed to be loaded via this mode unless they are explicitly allowlisted by the user via torch.serialization.add_safe_globals. We recommend you start setting weights_only=True for any use case where you don't have full control of the loaded file. Please open an issue on GitHub for any issues related to this experimental feature.
Convert GroundingDINO to OpenVINO IR format#
ov_dino_path = IRS_PATH / f"{ov_dino_name}.xml"
if not ov_dino_path.exists():
tokenized = pt_grounding_dino_model.tokenizer(["the running dog ."], return_tensors="pt")
input_ids = tokenized["input_ids"]
token_type_ids = tokenized["token_type_ids"]
attention_mask = tokenized["attention_mask"]
position_ids = torch.arange(input_ids.shape[1]).reshape(1, -1)
text_token_mask = torch.randint(0, 2, (1, input_ids.shape[1], input_ids.shape[1]), dtype=torch.bool)
img = torch.randn(1, 3, *ground_dino_img_size)
dummpy_inputs = (
img,
input_ids,
attention_mask,
position_ids,
token_type_ids,
text_token_mask,
)
# without disabling gradients trace error occurs: "Cannot insert a Tensor that requires grad as a constant"
for par in pt_grounding_dino_model.parameters():
par.requires_grad = False
# If we don't trace manually ov.convert_model will try to trace it automatically with default check_trace=True, which fails.
# Therefore we trace manually with check_trace=False, despite there are warnings after tracing and conversion to OpenVINO IR
# output boxes are correct.
traced_model = torch.jit.trace(
pt_grounding_dino_model,
example_inputs=dummpy_inputs,
strict=False,
check_trace=False,
)
ov_dino_model = ov.convert_model(traced_model, example_input=dummpy_inputs)
ov.save_model(ov_dino_model, ov_dino_path)
else:
ov_dino_model = core.read_model(ov_dino_path)
FutureWarning: The device argument is deprecated and will be removed in v5 of Transformers.
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Iterating over a tensor might cause the trace to be incorrect. Passing a tensor of different shape won't change the number of iterations executed (and might lead to errors or silently give incorrect results).
TracerWarning: Iterating over a tensor might cause the trace to be incorrect. Passing a tensor of different shape won't change the number of iterations executed (and might lead to errors or silently give incorrect results).
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python integer might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python integer might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python integer might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: torch.as_tensor results are registered as constants in the trace. You can safely ignore this warning if you use this function to create tensors out of constant variables that would be the same every time you call this function. In any other case, this might cause the trace to be incorrect.
TracerWarning: Iterating over a tensor might cause the trace to be incorrect. Passing a tensor of different shape won't change the number of iterations executed (and might lead to errors or silently give incorrect results).
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Iterating over a tensor might cause the trace to be incorrect. Passing a tensor of different shape won't change the number of iterations executed (and might lead to errors or silently give incorrect results).
TracerWarning: Iterating over a tensor might cause the trace to be incorrect. Passing a tensor of different shape won't change the number of iterations executed (and might lead to errors or silently give incorrect results).
TracerWarning: Iterating over a tensor might cause the trace to be incorrect. Passing a tensor of different shape won't change the number of iterations executed (and might lead to errors or silently give incorrect results).
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
FutureWarning: torch.cuda.amp.autocast(args...) is deprecated. Please use torch.amp.autocast('cuda', args...) instead.
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
WARNING:tensorflow:Please fix your imports. Module tensorflow.python.training.tracking.base has been moved to tensorflow.python.trackable.base. The old module will be deleted in version 2.11.
[ WARNING ] Please fix your imports. Module %s has been moved to %s. The old module will be deleted in version %s.
Run OpenVINO optimized GroundingDINO#
device = device_widget()
device
Dropdown(description='Device:', index=1, options=('CPU', 'AUTO'), value='AUTO')
In order to run inference ov_dino_model should be compiled.
Resulting ov.CompiledModel object receives the same arguments as
pytorch forward/__call__ methods.
ov_compiled_grounded_dino = core.compile_model(ov_dino_model, device.value)
We will reuse only tokenizer from the original GroundingDINO model class, but the inference will be done using OpenVINO optimized model.
def transform_image(pil_image: Image.Image) -> torch.Tensor:
import groundingdino.datasets.transforms as T
transform = T.Compose(
[
T.RandomResize([800], max_size=1333),
T.ToTensor(),
T.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225]),
]
)
image, _ = transform(pil_image, None) # 3, h, w
return image
# detects boxes usding openvino optimized grounding dino model
def get_ov_grounding_output(
model: ov.CompiledModel,
pil_image: Image.Image,
caption: Union[str, List[str]],
box_threshold: float,
text_threshold: float,
dino_tokenizer: transformers.PreTrainedTokenizerBase = dino_tokenizer,
max_text_len: int = max_text_len,
):
# for text prompt pre-processing we reuse existing routines from GroundignDINO repo
if isinstance(caption, list):
caption = ". ".join(caption)
caption = caption.lower()
caption = caption.strip()
if not caption.endswith("."):
caption = caption + "."
captions = [caption]
tokenized = dino_tokenizer(captions, padding="longest", return_tensors="pt")
specical_tokens = dino_tokenizer.convert_tokens_to_ids(["[CLS]", "[SEP]", ".", "?"])
(
text_self_attention_masks,
position_ids,
cate_to_token_mask_list,
) = generate_masks_with_special_tokens_and_transfer_map(tokenized, specical_tokens, dino_tokenizer)
if text_self_attention_masks.shape[1] > max_text_len:
text_self_attention_masks = text_self_attention_masks[:, :max_text_len, :max_text_len]
position_ids = position_ids[:, :max_text_len]
tokenized["input_ids"] = tokenized["input_ids"][:, :max_text_len]
tokenized["attention_mask"] = tokenized["attention_mask"][:, :max_text_len]
tokenized["token_type_ids"] = tokenized["token_type_ids"][:, :max_text_len]
# inputs dictionary which will be fed into the ov.CompiledModel for inference
inputs = {}
inputs["attention_mask.1"] = tokenized["attention_mask"]
inputs["text_self_attention_masks"] = text_self_attention_masks
inputs["input_ids"] = tokenized["input_ids"]
inputs["position_ids"] = position_ids
inputs["token_type_ids"] = tokenized["token_type_ids"]
# GroundingDINO fails to run with input shapes different than one used for conversion.
# As a workaround we resize input_image to the size used for conversion. Model does not rely
# on image resolution to know object sizes therefore no need to resize box_predictions
from torchvision.transforms.functional import resize, InterpolationMode
input_img = resize(
transform_image(pil_image),
ground_dino_img_size,
interpolation=InterpolationMode.BICUBIC,
)[None, ...]
inputs["samples"] = input_img
# OpenVINO inference
request = model.create_infer_request()
request.start_async(inputs, share_inputs=False)
request.wait()
def sig(x):
return 1 / (1 + np.exp(-x))
logits = torch.from_numpy(sig(np.squeeze(request.get_tensor("pred_logits").data, 0)))
boxes = torch.from_numpy(np.squeeze(request.get_tensor("pred_boxes").data, 0))
# filter output
filt_mask = logits.max(dim=1)[0] > box_threshold
logits, boxes = logits[filt_mask], boxes[filt_mask]
# get phrase and build predictions
tokenized = dino_tokenizer(caption)
pred_phrases = []
for logit in logits:
pred_phrase = get_phrases_from_posmap(logit > text_threshold, tokenized, dino_tokenizer)
pred_phrases.append(pred_phrase + f"({str(logit.max().item())[:4]})")
return boxes, pred_phrases, logits.max(dim=1)[0]
SOURCE_IMAGE_PATH = f"{ground_dino_dir}/.asset/demo7.jpg"
BOX_THRESHOLD = 0.3
TEXT_THRESHOLD = 0.25
NMS_THRESHOLD = 0.8
pil_image = Image.open(SOURCE_IMAGE_PATH)
classes_prompt = ["Horse", "Cloud"]
boxes_filt, pred_phrases, logits_filt = get_ov_grounding_output(ov_compiled_grounded_dino, pil_image, classes_prompt, BOX_THRESHOLD, TEXT_THRESHOLD)
Convert predicted boxes to supervision box detections format
source_w, source_h = pil_image.size
detections = Model.post_process_result(source_h=source_h, source_w=source_w, boxes=boxes_filt, logits=logits_filt)
class_id = Model.phrases2classes(phrases=pred_phrases, classes=list(map(str.lower, classes_prompt)))
detections.class_id = class_id
Draw box detections
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
labels = [f"{classes_prompt[class_id] if class_id is not None else 'None'} {confidence:0.2f}" for _, _, confidence, class_id, _, _ in detections]
annotated_frame = box_annotator.annotate(scene=np.array(pil_image).copy(), detections=detections)
annotated_frame = label_annotator.annotate(scene=annotated_frame.copy(), detections=detections, labels=labels)
Image.fromarray(annotated_frame)
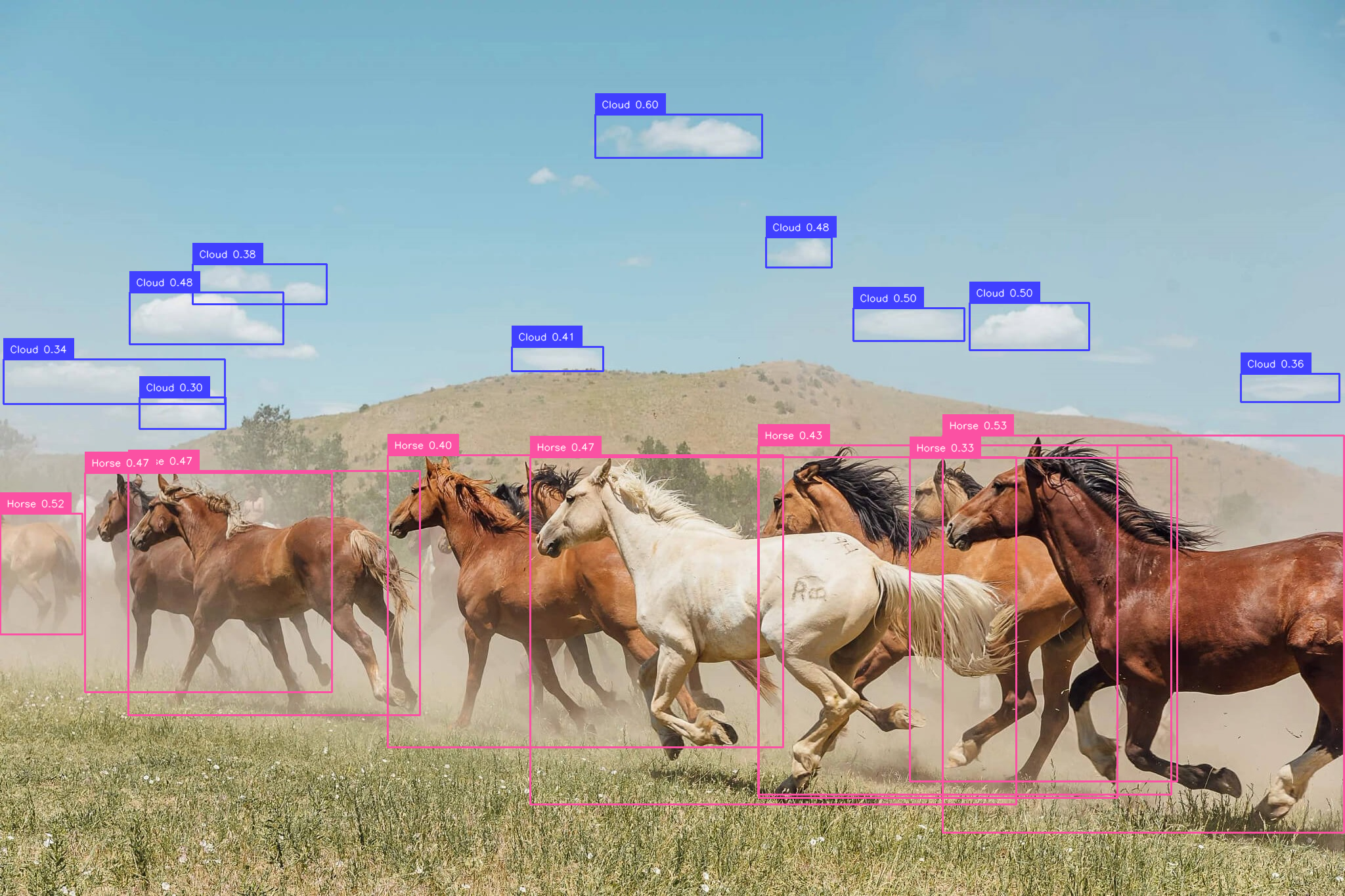
Great! All clouds and horses are detected. Feel free to play around and specify other objects you wish to detect.
Convert SAM to OpenVINO IR#
And now let’s feed those detection to SAM model. We will use
EfficiendSAM for faster computation and to save ram, but feel free
to select vanilla SAM if you wish more detailed and precise
segmentation. First of all let’s convert SAM model to OpenVINO IR.
ov_efficient_sam_name = "openvino_efficient_sam"
ov_efficient_sam_path = IRS_PATH / f"{ov_efficient_sam_name}.xml"
# convert EfficientSAM to OpenVINO IR format
if not ov_efficient_sam_path.exists() and use_efficient_sam:
random_input_image = np.random.rand(1, 3, *pil_image.size[::-1]).astype(np.float32)
bounding_box = np.array([900, 100, 1000, 200]).reshape([1, 1, 2, 2])
bbox_labels = np.array([2, 3]).reshape([1, 1, 2])
efficient_sam_dummy_input = tuple(torch.from_numpy(x) for x in (random_input_image, bounding_box, bbox_labels))
ov_efficient_sam = ov.convert_model(efficient_sam_model, example_input=efficient_sam_dummy_input)
ov.save_model(ov_efficient_sam, ov_efficient_sam_path)
elif use_efficient_sam:
ov_efficient_sam = core.read_model(ov_efficient_sam_path)
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python float might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
Below is conversion of vanilla SAM. This code is not used when
EfficientSAM is selected for segmentation.
# In order to convert to OpenVINO IR neeed to patch forward method or the torch.nn.Module for SAM
class SamMaskFromBoxes(torch.nn.Module):
def __init__(
self,
sam_predictor,
) -> None:
super().__init__()
self.model = sam_predictor
@torch.no_grad()
def forward(
self,
input_image: torch.Tensor,
transformed_boxes: torch.Tensor,
multimask_output: bool = False,
hq_token_only: bool = False,
):
pre_processed_image = self.model.model.preprocess(input_image)
image_embeddings, interm_features = self.model.model.image_encoder(pre_processed_image)
# Embed prompts
sparse_embeddings, dense_embeddings = self.model.model.prompt_encoder(
points=None,
boxes=transformed_boxes,
masks=None,
)
# Predict masks
low_res_masks, iou_predictions = self.model.model.mask_decoder(
image_embeddings=image_embeddings,
image_pe=self.model.model.prompt_encoder.get_dense_pe(),
sparse_prompt_embeddings=sparse_embeddings,
dense_prompt_embeddings=dense_embeddings,
multimask_output=multimask_output,
hq_token_only=hq_token_only,
interm_embeddings=interm_features,
)
return low_res_masks, iou_predictions
ov_sam_path = IRS_PATH / f"{ov_sam_name}.xml"
# example input for vanilla SAM
input_image_torch = torch.randint(0, 255, size=[1, 3, 683, 1024], dtype=torch.uint8)
dummy_transformed_boxes = torch.rand(1, 4, dtype=torch.float32) * 200
# convert vanilla SAM to OpenVINO IR format
if not ov_sam_path.exists() and not use_efficient_sam:
# Load pytorch model object and prepare example input for conversion
exportable = SamMaskFromBoxes(sam_predictor)
exportable.model.model.eval()
for par in exportable.model.model.parameters():
par.requires_grad = False
traced = torch.jit.trace(exportable, example_inputs=(input_image_torch, dummy_transformed_boxes))
ov_sam = ov.convert_model(traced, example_input=(input_image_torch, dummy_transformed_boxes))
ov.save_model(ov_sam, ov_sam_path)
elif not use_efficient_sam:
ov_sam = core.read_model(ov_sam_path)
if use_efficient_sam:
compiled_efficient_sam = core.compile_model(ov_efficient_sam, device_name=device.value)
else:
compiled_vanilla_sam = core.compile_model(ov_sam, device_name=device.value)
Combine GroundingDINO + SAM (GroundedSAM)#
We have OpenVINO IRs for both GroundingDINO and SAM models. Lets run the
segmentation using predictions from GroundingDINO. Same as above, use
EfficientSAM by default.
def predict_efficient_sam_mask(compiled_efficient_sam: ov.CompiledModel, image: Image.Image, bbox: torch.Tensor):
# input image is scaled so that none of the sizes is greater than 1024, same as in efficient-sam notebook
input_size = 1024
w, h = image.size[:2]
scale = input_size / max(w, h)
new_w = int(w * scale)
new_h = int(h * scale)
image = image.resize((new_w, new_h))
numpy_image = np.array(image, dtype=np.float32) / 255.0
numpy_image = np.transpose(numpy_image, (2, 0, 1))[None, ...]
scaled_points = bbox * scale
bounding_box = scaled_points.reshape([1, 1, 2, 2])
bbox_labels = np.reshape(np.array([2, 3]), [1, 1, 2])
res = compiled_efficient_sam((numpy_image, bounding_box, bbox_labels))
predicted_logits, predicted_iou = res[0], res[1]
all_masks = torch.ge(torch.sigmoid(torch.from_numpy(predicted_logits[0, 0, :, :, :])), 0.5).numpy()
predicted_iou = predicted_iou[0, 0, ...]
# select the mask with the greatest IOU
max_predicted_iou = -1
selected_mask_using_predicted_iou = None
for m in range(all_masks.shape[0]):
curr_predicted_iou = predicted_iou[m]
if curr_predicted_iou > max_predicted_iou or selected_mask_using_predicted_iou is None:
max_predicted_iou = curr_predicted_iou
selected_mask_using_predicted_iou = all_masks[m]
return selected_mask_using_predicted_iou
# If several detections are fed to EfficientSAM, it merges them to a single mask. Therefore, we call it one by one for each detection.
def predict_efficient_sam_masks(compiled_efficient_sam: ov.CompiledModel, pil_image: Image.Image, transformed_boxes) -> torch.Tensor:
masks = []
for bbox in transformed_boxes:
mask = predict_efficient_sam_mask(compiled_efficient_sam, pil_image, bbox)
mask = Image.fromarray(mask).resize(pil_image.size)
masks.append(np.array(mask))
masks = torch.from_numpy(np.array(masks))
return masks
def transform_boxes(sam_predictor: torch.nn.Module, boxes: torch.Tensor, size: tuple) -> torch.Tensor:
H, W = size[0], size[1]
for i in range(boxes.size(0)):
boxes[i] = boxes[i] * torch.Tensor([W, H, W, H])
boxes[i][:2] -= boxes[i][2:] / 2
boxes[i][2:] += boxes[i][:2]
return sam_predictor.transform.apply_boxes_torch(boxes, size).to(PT_DEVICE)
def predict_vanilla_sam_masks(
compiled_vanilla_sam: ov.CompiledModel,
image: np.ndarray,
transformed_boxes: torch.Tensor,
) -> torch.Tensor:
transfromed_image = exportable.model.transform.apply_image(image)
input_image_torch = torch.as_tensor(transfromed_image, device=PT_DEVICE)
input_image_torch = input_image_torch.permute(2, 0, 1).contiguous()[None, :, :, :]
original_size = tuple(image.shape[:2])
input_size = tuple(input_image_torch.shape[-2:])
low_res_masks = compiled_vanilla_sam((input_image_torch, transformed_boxes))[0]
# Upscale the masks to the original image resolution
masks = exportable.model.model.postprocess_masks(torch.from_numpy(low_res_masks), input_size, original_size)
masks = masks > exportable.model.model.mask_threshold
return masks
Run SAM model for the same image with the detected boxes from GroundingDINO.
Please note that vanilla SAM and EfficientSAM have slightly different
detection formats. But inputs for both of them originate from
boxes_filt which is result of the get_ov_grounding_output. For
EfficientSAM we use detections.xyxy boxes obtained after
boxes_filt is fed to Model.post_process_result. While vanilla
SAM has it’s own preprocessing function transform_boxes.
if use_efficient_sam:
masks = predict_efficient_sam_masks(compiled_efficient_sam, pil_image, detections.xyxy)
detections.mask = masks.numpy()
else:
transformed_boxes = transform_boxes(sam_predictor, boxes_filt, pil_image.size[::-1])
masks = predict_vanilla_sam_masks(compiled_vanilla_sam, np.array(pil_image), transformed_boxes)
detections.mask = masks[:, 0].numpy()
Combine both boxes and segmentation masks and draw them.
box_annotator = sv.BoxAnnotator()
mask_annotator = sv.MaskAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = np.array(pil_image)
annotated_image = mask_annotator.annotate(scene=np.array(pil_image).copy(), detections=detections)
annotated_image = box_annotator.annotate(scene=annotated_image, detections=detections)
annotated_image = label_annotator.annotate(scene=annotated_image, detections=detections, labels=labels)
Image.fromarray(annotated_image)
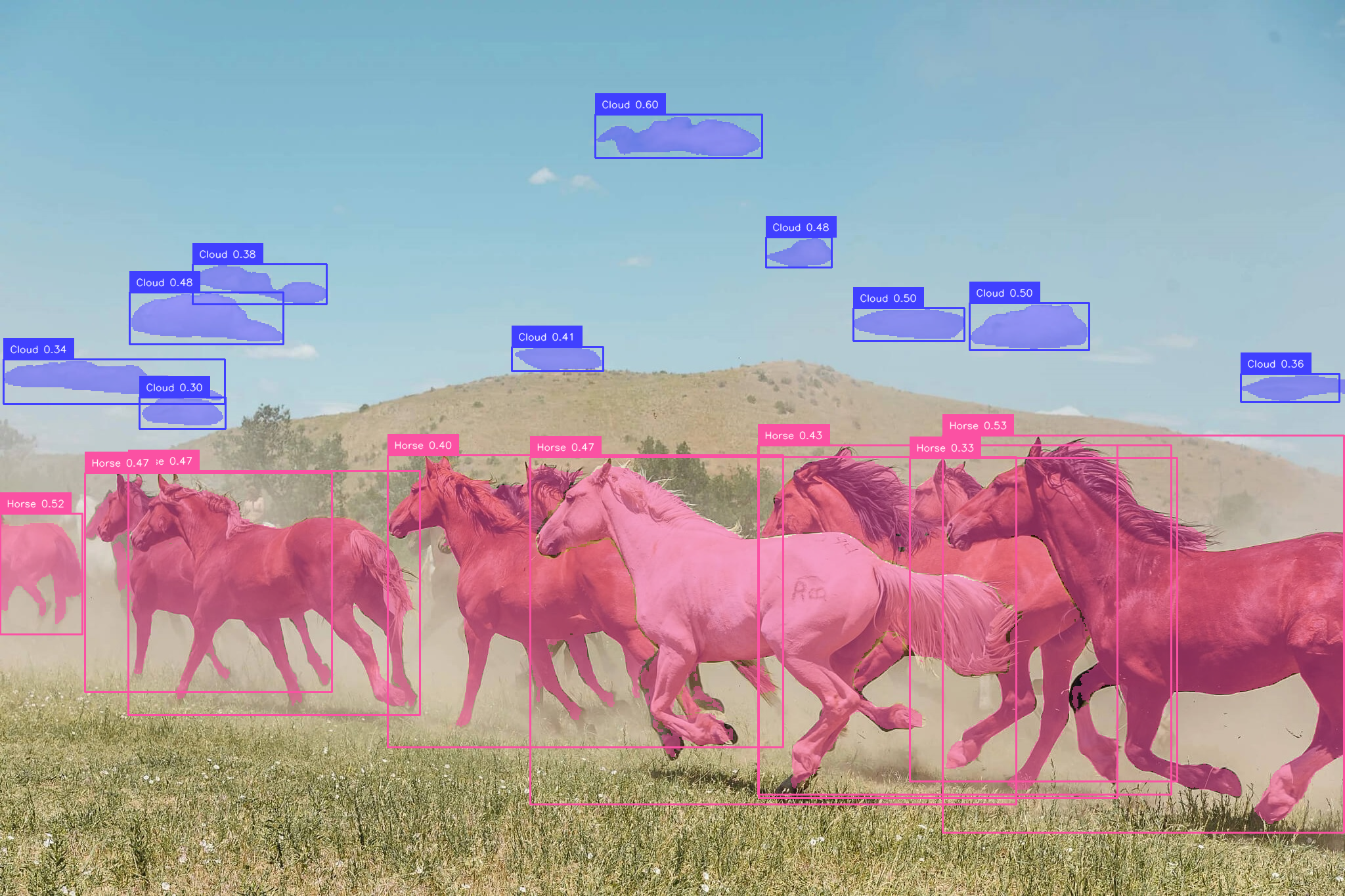
Great! All detected horses and clouds are segmented as well.
Interactive GroundedSAM#
Now, you can try apply grounding sam on your own images using interactive demo. The code below provides helper functions used in demonstration.
def draw_mask(mask, draw, random_color=False):
if random_color:
color = (
np.random.randint(0, 255),
np.random.randint(0, 255),
np.random.randint(0, 255),
153,
)
else:
color = (30, 144, 255, 153)
nonzero_coords = np.transpose(np.nonzero(mask))
for coord in nonzero_coords:
draw.point(coord[::-1], fill=color)
def draw_box(box, draw, label):
# random color
color = tuple(np.random.randint(0, 255, size=3).tolist())
draw.rectangle(((box[0], box[1]), (box[2], box[3])), outline=color, width=4)
if label:
font = ImageFont.load_default(18)
if hasattr(font, "getbbox"):
bbox = draw.textbbox((box[0], box[1]), str(label), font, anchor="ld")
else:
w, h = draw.textsize(str(label), font)
bbox = (box[0], box[1], box[0] + w, box[1] + h)
draw.rectangle(bbox, fill=color)
draw.text((box[0], box[1]), str(label), fill="white", anchor="ld", font=font)
import gradio as gr
""""
run_grounding_sam is called every time "Submit" button is clicked
"""
def run_grounding_sam(image, task_type, text_prompt, box_threshold, text_threshold):
pil_image = Image.fromarray(image)
size = image.shape[1], image.shape[0] # size is WH image.shape HWC
boxes_filt, scores, pred_phrases = get_ov_grounding_output(ov_compiled_grounded_dino, pil_image, text_prompt, box_threshold, text_threshold)
# process boxes
H, W = size[1], size[0]
for i in range(boxes_filt.size(0)):
boxes_filt[i] = boxes_filt[i] * torch.Tensor([W, H, W, H])
boxes_filt[i][:2] -= boxes_filt[i][2:] / 2
boxes_filt[i][2:] += boxes_filt[i][:2]
if task_type == "seg":
if use_efficient_sam:
masks = predict_efficient_sam_masks(compiled_efficient_sam, pil_image, boxes_filt.numpy())
else:
transformed_boxes = sam_predictor.transform.apply_boxes_torch(boxes_filt, image.shape[:2]).to(PT_DEVICE)
masks = predict_vanilla_sam_masks(compiled_vanilla_sam, image, transformed_boxes)[:, 0]
mask_image = Image.new("RGBA", size, color=(0, 0, 0, 0))
mask_draw = ImageDraw.Draw(mask_image)
for mask in masks:
draw_mask(mask.numpy(), mask_draw, random_color=True)
image_draw = ImageDraw.Draw(pil_image)
for box, label in zip(boxes_filt, pred_phrases):
draw_box(box, image_draw, label)
pil_image = pil_image.convert("RGBA")
pil_image.alpha_composite(mask_image)
return [pil_image, mask_image]
if task_type == "det":
image_draw = ImageDraw.Draw(pil_image)
for box, label in zip(boxes_filt, pred_phrases):
draw_box(box, image_draw, label)
return [pil_image]
else:
gr.Warning(f"task_type:{task_type} error!")
You can run interactive app with your own image and text prompts. To
define prompt specify comma (or conjunction) separated names of objects
you wish to segment. For demonstration, this demo already has two
predefined examples. If many object are crowded and overlapping please
increase threshold values in Advanced options.
if not Path("gradio_helper.py").exists():
r = requests.get(url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/notebooks/grounded-segment-anything/gradio_helper.py")
open("gradio_helper.py", "w").write(r.text)
from gradio_helper import make_demo
demo = make_demo(fn=run_grounding_sam)
try:
demo.launch(debug=False, height=1000)
except Exception:
demo.launch(share=True, debug=False, height=1000)
# if you are launching remotely, specify server_name and server_port
# demo.launch(server_name='your server name', server_port='server port in int')
# Read more in the docs: https://gradio.app/docs/
Running on local URL: http://127.0.0.1:7860 To create a public link, set share=True in launch().
Cleanup#
# import shutil
# shutil.rmtree(CKPT_BASE_PATH)
# shutil.rmtree(IRS_PATH)