person-vehicle-bike-detection-crossroad-1016#
Use Case and High-Level Description#
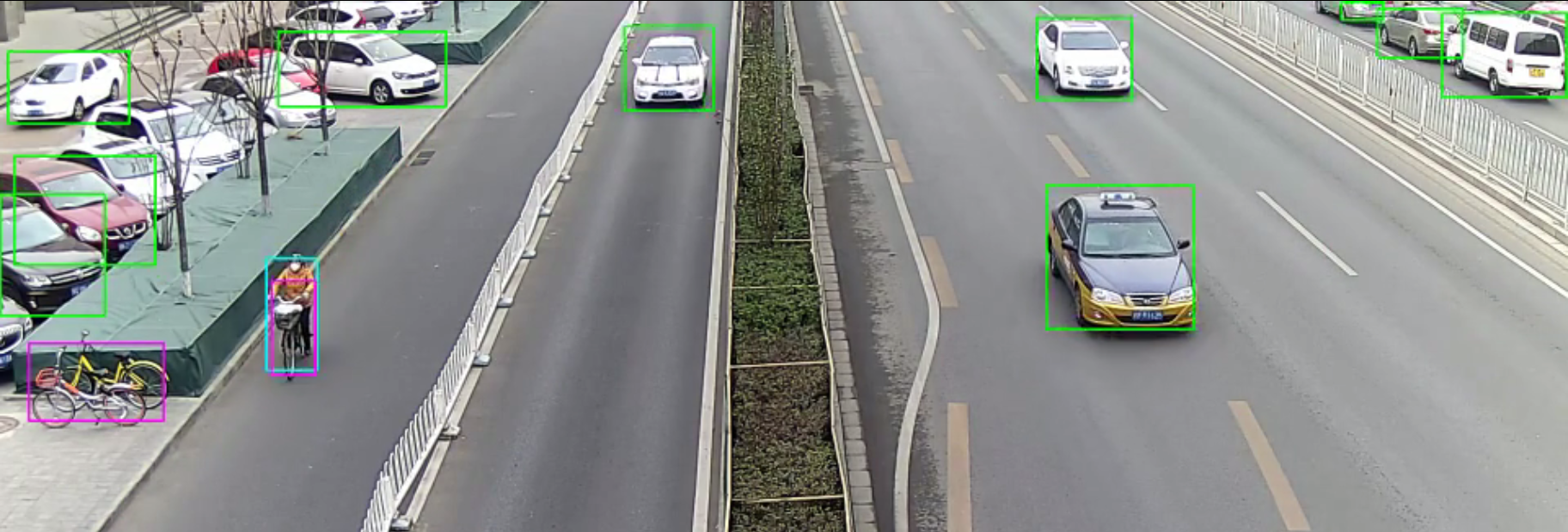
MobileNetV2 + SSD-based network is for Person/Vehicle/Bike detection in security surveillance applications. Works in a variety of scenes and weather/lighting conditions.
Example#
Specification#
Metric |
Value |
|---|---|
Mean Average Precision (mAP) |
62.55% |
AP people |
73.63% |
AP vehicles |
77.84% |
AP bikes |
36.18% |
Max objects to detect |
200 |
GFlops |
3.560 |
Source framework |
PyTorch* |
Average Precision (AP) is defined as an area under the precision/recall curve.
Validation dataset consists of 34,757 images from various scenes and includes:
Type of object |
Number of bounding boxes |
|---|---|
Vehicle |
229,503 |
Pedestrian |
240,009 |
Non-vehicle |
62,643 |
Similarly, training dataset has 219,181 images with:
Type of object |
Number of bounding boxes |
|---|---|
Vehicle |
810,323 |
Pedestrian |
1,114,799 |
Non-vehicle |
62,334 |
Inputs#
Image, name: input.1, shape: 1, 3, 512, 512 in the format B, C, H, W, where:
B- batch sizeC- number of channelsH- image heightW- image width
Expected color order: BGR.
Outputs#
The net outputs blob with shape: 1, 1, 200, 7 in the format 1, 1, N, 7, where N is the number of detected
bounding boxes. Each detection has the format [image_id, label, conf, x_min, y_min, x_max, y_max], where:
image_id- ID of the image in the batchlabel- predicted class ID (0 - non-vehicle, 1 - vehicle, 2 - person)conf- confidence for the predicted class(
x_min,y_min) - coordinates of the top left bounding box corner(
x_max,y_max) - coordinates of the bottom right bounding box corner
Demo usage#
The model can be used in the following demos provided by the Open Model Zoo to show its capabilities:
Legal information#
[*] Other names and brands may be claimed as the property of others.