vehicle-license-plate-detection-barrier-0123¶
Use Case and High-level Description¶
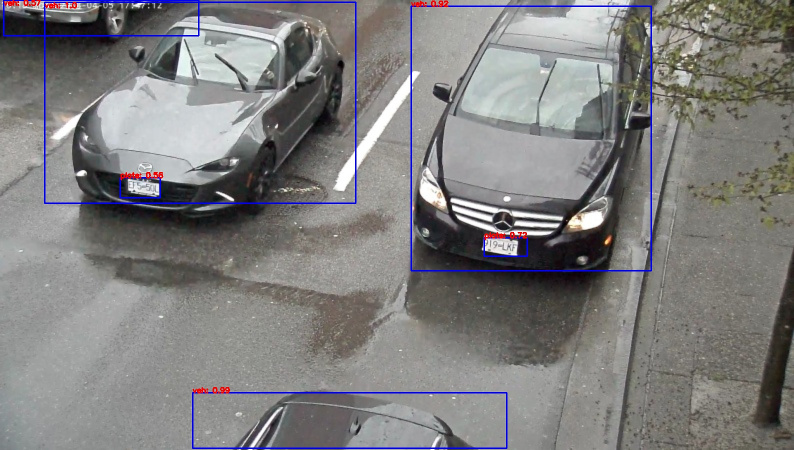
This is a MobileNetV2 + SSD-based vehicle and (Chinese) license plate detector for the “Barrier” use case.
Example¶
Specification¶
Metric |
Value |
|---|---|
Mean Average Precision (mAP) |
99.52% |
AP vehicles |
99.90% |
AP plates |
99.13% |
Car pose |
Front facing cars |
Min plate width |
96 pixels |
Max objects to detect |
200 |
GFlops |
0.271 |
MParams |
0.547 |
Source framework |
TensorFlow* |
Average Precision (AP) is defined as an area under the precision/recall curve. Validation dataset is BIT-Vehicle.
Input¶
Original Model¶
An input image, name: input, shape: 1, 256, 256, 3, format: B, H, W, C, where:
B- batch sizeH- image heightW- image widthC- number of channels
Expected color order: RGB.
Mean values: [127.5, 127.5, 127.5], scale factor for each channel: 127.5
Converted Model¶
An input image, name: input, shape: 1, 256, 256, 3, format: B, H, W, C, where:
B- batch sizeH- image heightW- image widthC- number of channels
Expected color order is BGR.
Output¶
Original Model¶
The net outputs a blob with the shape: 1, 1, 200, 7 in the format 1, 1, N, 7, where N is the number of detected
bounding boxes. For each detection, the description has the format:
[image_id, label, conf, x_min, y_min, x_max, y_max], where:
image_id- ID of the image in the batchlabel- predicted class IDconf- confidence for the predicted class(
x_min,y_min) - coordinates of the top left bounding box corner(
x_max,y_max) - coordinates of the bottom right bounding box corner.
Converted Model¶
The net outputs a blob with the shape: 1, 1, 200, 7 in the format 1, 1, N, 7, where N is the number of detected
bounding boxes. For each detection, the description has the format:
[image_id, label, conf, x_min, y_min, x_max, y_max], where:
image_id- ID of the image in the batchlabel- predicted class IDconf- confidence for the predicted class(
x_min,y_min) - coordinates of the top left bounding box corner(
x_max,y_max) - coordinates of the bottom right bounding box corner.
Download a Model and Convert it into OpenVINO™ IR Format¶
You can download models and if necessary convert them into OpenVINO™ IR format using the Model Downloader and other automation tools as shown in the examples below.
An example of using the Model Downloader:
omz_downloader --name <model_name>
An example of using the Model Converter:
omz_converter --name <model_name>
Demo usage¶
The model can be used in the following demos provided by the Open Model Zoo to show its capabilities:
Legal Information¶
The original model is distributed under the
Apache License, Version 2.0.
A copy of the license is provided in <omz_dir>/models/public/licenses/APACHE-2.0.txt.
[*] Other names and brands may be claimed as the property of others.