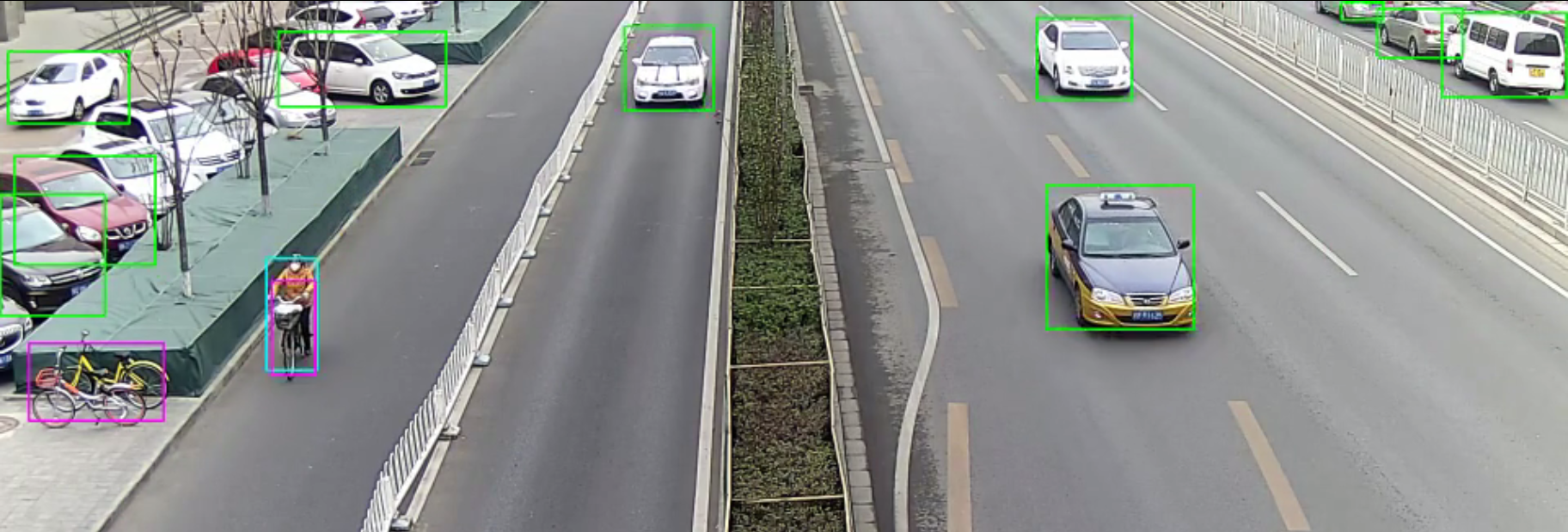
This is a person, vehicle, bike detector that is based on MobileNetV2 backbone with ATSS head for 864x480 resolution.
| Metric | Value |
|---|---|
| AP @ [ IoU=0.50:0.95 ] | 0.336 (internal test set) |
| GFlops | 6.550 |
| MParams | 2.416 |
| Source framework | PyTorch* |
Average Precision (AP) is defined as an area under the precision/recall curve.
Name: input, shape: 1, 3, 480, 864 - An input image in the format B, C, H, W, where:
Expected color order is BGR.
boxes is a blob with shape: N, 5, where N is the number of detected bounding boxes. For each detection, the description has the format: [x_min, y_min, x_max, y_max, conf], where:x_min, y_min) - coordinates of the top left bounding box cornerx_max, y_max) - coordinates of the bottom right bounding box corner.conf - confidence for the predicted classlabels is a blob with shape: N, where N is the number of detected bounding boxes. The value of each label is equal to predicted class ID (0 - vehicle, 1 - person, 2 - non-vehicle).[*] Other names and brands may be claimed as the property of others.
